1. Executive Summary
During the period of June 21 to June 27, 2026, the geopolitical and security environment between the United States and the Islamic Republic of Iran experienced severe and rapid oscillation between major diplomatic breakthroughs and kinetic military escalation. Following the June 17 Islamabad Memorandum of Understanding (MoU)—which aimed to end the recent 70-day bilateral conflict and reopen the heavily contested Strait of Hormuz—high-level diplomatic and technical negotiations officially commenced at the Bürgenstock resort in Switzerland.1 Facilitated heavily by joint mediators Pakistan and Qatar, these intensive talks resulted in the formation of structured working groups covering nuclear issues, sanctions relief, and dispute resolution, alongside a highly scrutinized “Lebanon deconfliction cell” designed to isolate the Lebanese theater from the broader regional confrontation.1 Concurrently, the United States Department of the Treasury issued General License X (GL X), offering a broad 60-day authorization for transactions involving Iranian petroleum and petrochemical products, signaling a deliberate strategic shift from Washington’s prior “maximum pressure” doctrine toward a model of conditional economic incentivization.4
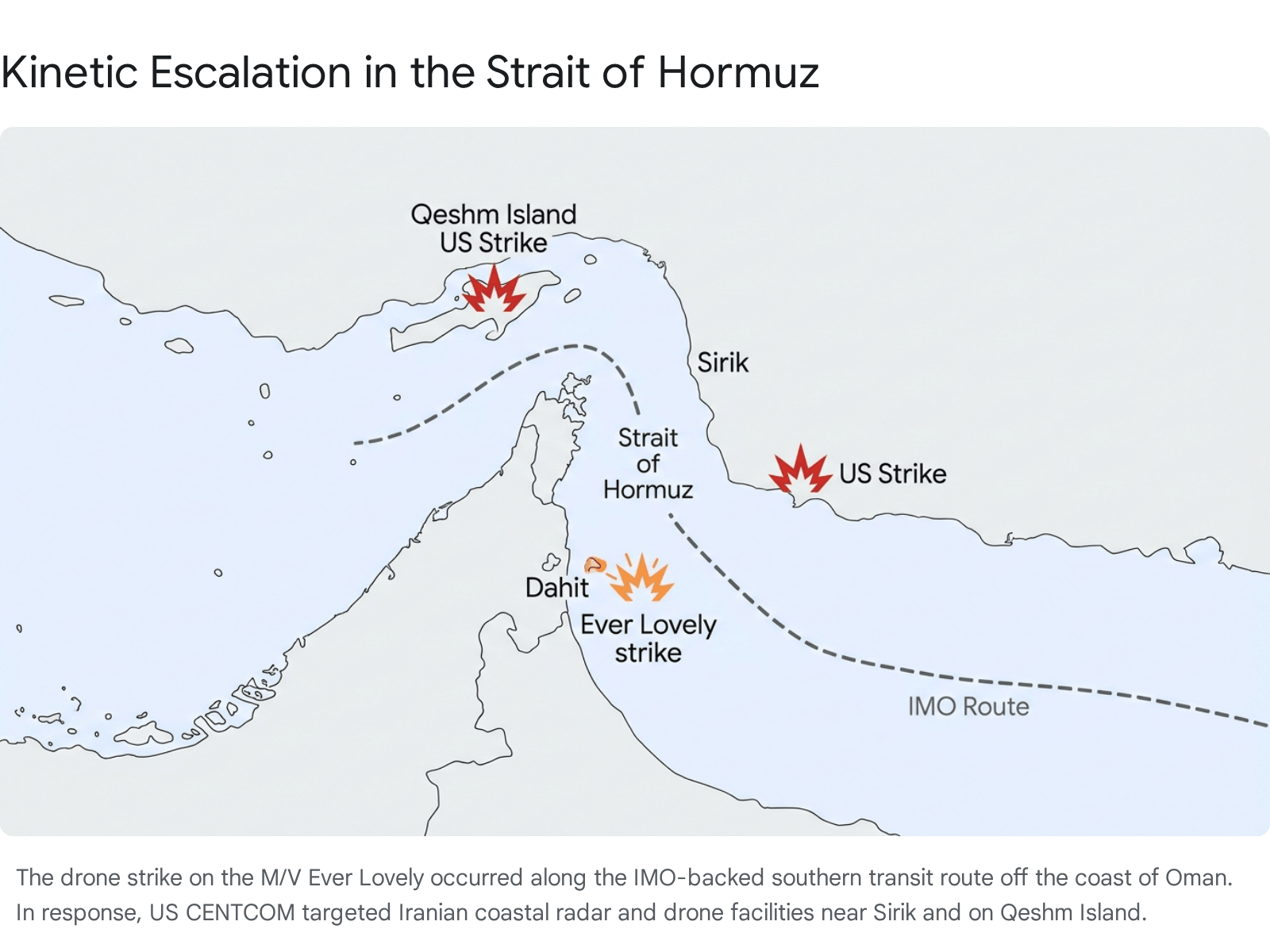
However, this fragile diplomatic progress was actively undermined and severely tested by a resumption of violence in the vital maritime chokepoint of the Strait of Hormuz. On June 25, an Iranian Islamic Revolutionary Guard Corps Navy (IRGC-N) one-way attack drone successfully struck the Singapore-flagged commercial container ship M/V Ever Lovely as it navigated a newly designated southern transit corridor off the Omani coast.6 The targeted attack exposed a fundamental and unresolved dispute over maritime sovereignty, with Tehran demanding strict adherence to transit routes governed by its unilaterally established Persian Gulf Strait Authority (PGSA) while aggressively rejecting the International Maritime Organization (IMO) framework.6 In direct kinetic retaliation for the attack on commercial shipping, US Central Command (CENTCOM) launched localized airstrikes on June 26, targeting Iranian coastal radar sites and missile storage facilities near the southern port of Sirik and on Qeshm Island.9
The resulting volatile security environment has forced regional and global actors into a delicate strategic balancing act. Gulf Cooperation Council (GCC) states, convening in Manama, Bahrain, alongside US Secretary of State Marco Rubio, firmly rejected Iranian attempts to impose transit tolls in the Strait of Hormuz, while concurrently harboring deep, long-term anxieties regarding the reliability of US security guarantees in the region.5 Meanwhile, China has opportunistically capitalized on the diplomatic thaw to secure its energy import interests and project an image of a stabilizing global power, heavily endorsing Pakistan’s mediation efforts from the periphery.5 Ultimately, the verified events of the past seven days demonstrate a dual-track paradigm: a robust, mediator-driven diplomatic architecture is actively functioning in Europe, yet it remains highly vulnerable to localized military provocations, unresolved disputes over maritime sovereignty, and the persistent threat of proxy group escalation across the Middle East.
2. Detailed Operational and Diplomatic Developments
Direct Bilateral and Indirect Interactions: The Islamabad MoU and Bürgenstock Architecture
Historical Context and the Path to the Islamabad MoU To accurately contextualize the diplomatic maneuvers of the past week, it is necessary to acknowledge the deep historical friction between the United States and Iran, which stretches back to the 1979 Islamic Revolution and the subsequent hostage crisis.13 More recently, the regional security architecture was fundamentally destabilized by the June 2025 “Twelve-Day War,” initiated when Israel launched preemptive strikes against Iranian military and nuclear facilities, provoking widespread Iranian counter-strikes and drawing the US into direct kinetic engagements against Iranian nuclear sites.14 This period of instability culminated in early 2026 when US President Donald Trump authorized “Operation Epic Fury,” following intense lobbying and intelligence sharing by Israeli Prime Minister Benjamin Netanyahu, leading to a protracted 70-day conflict (frequently referred to in regional media as the 120-day war period when factoring in preceding proxy escalations).5
Following a failed ceasefire in April 2026—which collapsed within hours due to Israeli strikes on Beirut—and the imposition of a punishing US naval blockade on Iranian ports, Washington and Tehran agreed to new 60-day ceasefire conditions on June 12, 2026.1 This breakthrough was formalized on June 17, 2026, when the presidents of the United States and Iran remotely signed the 14-point Islamabad Memorandum of Understanding (MoU).1 The core tenets of the MoU require Iran to explicitly reaffirm that it will not develop nuclear weapons, mandate the cessation of hostilities on all regional fronts (including Lebanon), and dictate that the Strait of Hormuz must be reopened toll-free, with Iran allocated a 30-day window to clear naval mines deployed during the conflict.1 In exchange, the US agreed to conditional, phased sanctions relief and the unfreezing of specific Iranian state assets.1 While Iran’s new Supreme Leader Mojtaba Khamenei—who assumed the role following the death of his late father, the slain Supreme Leader Ali Khamenei—ultimately approved the agreement, he publicly noted holding “a different view.” This signaled persistent hardline domestic resistance within Tehran, further evidenced by Iranian President Masoud Pezeshkian’s subsequent clarification that the nation’s ballistic missile program remains strictly outside the scope of the MoU.1
The Bürgenstock Technical Negotiations With the MoU serving as a foundational framework, intensive technical negotiations officially commenced on June 21, 2026, at the Bürgenstock resort above Lake Lucerne in Switzerland.1 The diplomatic gathering, colloquially dubbed the Lake Lucerne Summit, was organized rapidly, forcing the resort to cancel over a thousand reservations to accommodate the influx of diplomatic personnel.18 The United States delegation was led by Vice President J.D. Vance, while the Iranian delegation was headed by the Speaker of the Iranian Parliament, Mohammad Bagher Ghalibaf.2
The structural format of the negotiations relied heavily on the joint mediation of Pakistan and Qatar, who maintained a continuous, personalized channel of shuttling officials between the respective American and Iranian delegations.1 Following an initial 18 hours of continuous, intensive discussions, the mediators announced that the sessions had concluded in a “positive and constructive atmosphere” marked by encouraging progress.1 The primary architectural outcome of these initial meetings was the establishment of a robust oversight structure.
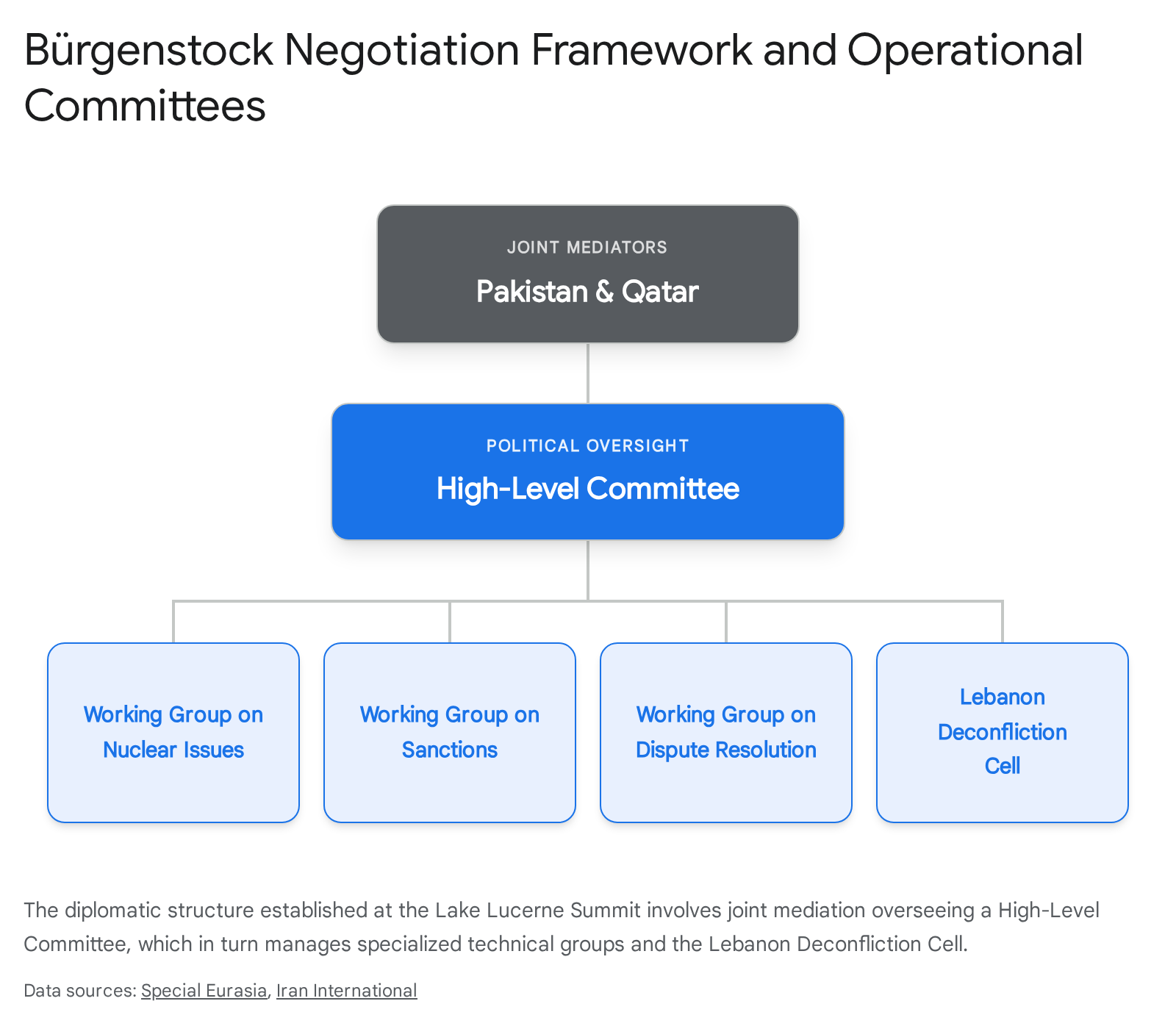
The negotiators successfully established a High-Level Committee tasked with broad political oversight, which oversees specialized working groups dedicated specifically to nuclear issues, sanctions mechanics, and ongoing dispute resolution.1 Despite the procedural success, the tone of the Iranian delegation underscored a profound lack of trust. Mohammad Mokhber, a senior adviser and assistant to Iran’s Supreme Leader, explicitly warned that Tehran would not accept a mere “paper agreement,” asserting that “Americans understand the language of economics and cost-benefit better” and cautioning that regional energy flows would rapidly halt once again if the deal remained strictly textual without yielding tangible economic relief.1 Reinforcing this economic imperative, Hamid Bovard, Iran’s Deputy Oil Minister and CEO of the National Iranian Oil Company (NIOC), actively participated in the Swiss talks, publicly stating that pursuing the lifting of oil-related sanctions and securing operational waivers was the primary focus of his delegation.1
The Lebanon Deconfliction Cell A central point of contention during the Bürgenstock negotiations was the status of military operations in Lebanon. Iranian media reported early friction, alleging that Tehran briefly refused to return to four-way talks, arguing that substantive negotiations could not proceed while fighting continued in Lebanon, though US diplomats disputed accounts of any Iranian walkout.3 To bridge this critical gap, negotiators agreed on Sunday, June 21, to establish a tripartite “Lebanon deconfliction cell” involving the United States, Iran, and Lebanon, directly facilitated by the Qatari and Pakistani mediators.3
The explicit purpose of this cell is to ensure strict adherence to the cessation of military operations in Lebanon, fulfilling the MoU requirement to end hostilities on all fronts.3 Iranian Foreign Minister Abbas Araghchi identified this mechanism on social media as the “1st real test” of the agreement’s implementation.21 Iranian President Masoud Pezeshkian publicly hailed the creation of the cell as one of the most significant outcomes of the negotiations, portraying it as a major diplomatic success that compelled opposing forces to retreat from Lebanese territory.22 The geopolitical ramifications of this cell were immediately visible in Lebanon itself, where an internal political struggle over state sovereignty erupted. Following the ceasefire, billboards featuring Iran’s new Supreme Leader Mojtaba Khamenei alongside his late father were erected on the main route to Beirut-Rafic Hariri International Airport bearing the slogan “Thank you to loyal Iran.” 5 The Lebanese government swiftly ordered the removal of these posters, attempting to assert that decisions regarding Lebanon’s territory and security belong strictly to the sovereign Lebanese state, rather than serving as leverage for Iran-backed Hezbollah.5
Economic Statecraft and Sanctions Relief: General License X (GL X)
In direct fulfillment of the economic incentives outlined in the Islamabad MoU, the US Department of the Treasury’s Office of Foreign Assets Control (OFAC) executed a major policy shift on June 22, 2026, by issuing General License X (GL X).4 This authorization represents a temporary but profound reversal of the US “maximum pressure” doctrine, providing a critical 60-day window (expiring at 12:01 AM EDT on August 21, 2026) that permits a broad range of transactions in Iranian-origin crude oil, petroleum products, and petrochemicals.4
The scope of GL X is exhaustively comprehensive, effectively attempting to transition Iranian energy trade out of shadow networks and back into conventional, regulated global markets. The license explicitly authorizes transactions that would otherwise be severely penalized under multiple overlapping US sanctions frameworks, including the Iranian Transactions and Sanctions Regulations (31 C.F.R. Part 560), the Weapons of Mass Destruction Proliferators Sanctions Regulations (31 C.F.R. Part 544), and the Global Terrorism Sanctions Regulations (31 C.F.R. Part 594).4
| GL X Authorized Activities (Valid through Aug 21, 2026) | Exclusions / Risks Identified in OSINT |
| Production, sale, delivery, and offloading of Iranian crude and petrochemicals 24 | Lacks escrow mechanisms, creating high risk of fund diversion to military proxies (IRGC) 5 |
| US dollar-denominated payments directly to the Government of Iran 24 | Scheduled expiration (Aug 21) creates a severe compliance “cliff edge” for market participants 24 |
| Ancillary maritime services: insurance, bunkering, vessel registration, emergency repairs 24 | Remains subject to Executive Branch discretion; could be immediately revoked if MoU terms are breached 25 |
| Importation of Iranian-origin oil directly into the United States 24 | Does not cover non-energy sectors or relieve long-term, structural statutory sanctions 25 |
Operationally, GL X extends legal protection to the entirety of the maritime value chain. It permits global entities to engage in contracting, payment processing, insurance and classification services, salvage operations, brokerage, surveying, shipping operations, piloting services, and environmental mitigation related to Iranian oil.424 Notably, the license authorizes payments for these purchases to be made directly to the Government of Iran in US dollar-denominated funds, and even authorizes the direct importation of Iranian oil into the United States—a mechanism fundamentally designed to flood the market, lower global oil prices, and stabilize the US economy ahead of domestic political pressures.4
For Tehran, the macroeconomic implications of GL X are substantial. Iranian Foreign Minister Abbas Araghchi indicated that the broad unfreezing of assets and resumption of petrochemical exports could eventually unlock tens of billions of dollars in revenue, alongside a proposed $300 billion reconstruction program funded by Persian Gulf partners and private investments.5 Iranian economists anticipate that this fresh influx of foreign currency will empower Iran’s Central Bank to combat severe domestic inflation, stabilize the rapidly weakening rial, and replenish critically low foreign exchange reserves.5 However, economists have simultaneously urged policymakers to implement deep structural reforms to avoid historical economic traps such as “Dutch disease”—where a sudden influx of resource revenue artificially inflates the currency and harms other export sectors.5
Conversely, Western defense analysts and geopolitical risk observers have highlighted severe security vulnerabilities embedded within the GL X framework. The most critical concern is the intentional omission of escrow mechanisms or strict reporting requirements within the license.5 Critics warn that this fungibility of capital means newly acquired funds could easily bypass civilian infrastructure projects and flow directly to the Islamic Revolutionary Guard Corps (IRGC), allowing the paramilitary organization to rapidly rebuild military infrastructure, missile silos, and proxy supply lines that were systematically degraded by US and Israeli strikes during the 70-day war.5
Proxy Group Activities and Maritime Security Incidents: The Strait of Hormuz Chokepoint
Despite the diplomatic progress in Switzerland and the issuance of GL X, the physical security environment in the Middle East deteriorated sharply over the past week, driven by an uncompromising dispute over maritime sovereignty in the Strait of Hormuz. The core of this conflict lies in Iran’s attempt to unilaterally annex administrative control of the waterway. Following the outbreak of hostilities in February, Tehran established the Persian Gulf Strait Authority (PGSA) to strictly manage traffic and collect transit tolls from international shipping.6 The economic scale of this operation is massive; Iranian lawmaker Mohsen Zanganeh confirmed that Tehran is levying transit fees ranging from $1.5 million to $2 million per vessel, with Parliament Deputy Speaker Hamidreza Haji Babaei confirming that initial revenues have already been deposited into state accounts.8
In stark opposition to the PGSA, the United Nations’ International Maritime Organization (IMO) and the Sultanate of Oman have actively promoted a new, mine-free southern transit route along the Omani territorial coastline, designed to allow commercial vessels to bypass Iranian extortion.6 Iran vehemently rejects this IMO-backed corridor. The PGSA issued a public decree warning that any vessel transiting outside of routes explicitly designated by Iran “will not be covered by the guarantee of safe passage,” and declared that any consequences arising from the use of unauthorized routes would be the sole responsibility of the vessel’s owner and commander.6
This rhetorical threat materialized into kinetic action on June 25, 2026. At approximately 14:10 UTC, the M/V Ever Lovely—a Singapore-flagged commercial containership operated by Taiwan’s Evergreen Marine Corporation—was exiting the Strait of Hormuz along the IMO-backed southern corridor, roughly 7.5 nautical miles southeast of Dahit, Oman.6 The vessel was targeted by a swarm of at least four one-way attack drones deployed by the IRGC Navy.6 While US forces operating in the area successfully intercepted and knocked down three of the incoming munitions, one drone penetrated the defensive screen and struck the starboard side of the Ever Lovely‘s upper bridge structure.27 The United Kingdom Maritime Trade Operations (UKMTO) center confirmed the strike under Warning 074-26, reporting structural damage to the bridge but no casualties or environmental contamination, allowing the vessel to eventually complete its transit.66
The timing and location of the Ever Lovely attack were highly symbolic and strategically calculated. Occurring on June 25—the IMO’s internationally observed “Day of the Seafarer”—the strike was a deliberate affront to the UN agency.6 Furthermore, it occurred just two days after IMO Secretary-General Arsenio Dominguez had formally launched the agency’s Strait of Hormuz Evacuation Framework.6 The immediate consequence of the IRGC attack was a severe chilling effect on maritime confidence. The IMO was forced to temporarily suspend its evacuation operations to reconfirm that safety guarantees remained viable, while maritime data providers noted that the pace of shipping normalization immediately slowed, with at least two tankers reversing course away from the UN-backed route to avoid Iranian targeting.78
Kinetic Escalation: US Retaliatory Strikes and Regional Military Posture
The Iranian drone attack on commercial shipping triggered an immediate and forceful kinetic response from the United States military, placing the fragile MoU in jeopardy. On June 26, US Central Command executed a series of targeted airstrikes against sovereign Iranian territory.10 Utilizing a strike package that included six US warplanes supported by a half dozen aerial refueling tankers and a US Navy P-8 Poseidon maritime patrol aircraft, American forces targeted four specific coastal radar sites, as well as missile and drone storage locations.1028 The strikes were heavily concentrated near the southern Iranian port city of Sirik—where local state media reported explosions near a commercial pier—and on the strategically vital Qeshm Island, located directly adjacent to the Strait of Hormuz.9
The US military operation was accompanied by sharp strategic messaging from the highest levels of the American government. President Donald Trump, speaking shortly before the strikes commenced, explicitly categorized the Iranian drone attack as a “foolish violation” of the ceasefire, noting his frustration that Iran “took a shot yesterday, actually four of them”.7 US Vice President J.D. Vance reinforced this posture on social media, advising Tehran to “pick up the phone” to utilize the newly established deconfliction channels in Doha if they harbored disagreements regarding MoU implementation, warning bluntly that “violence will be met with violence”.7 CENTCOM’s official statement characterized the retaliation as a “powerful response” to unwarranted aggression, asserting that Iran’s dangerous behavior undermined the freedom of navigation vital to the international trade corridor, and reaffirming that the US military remains vigilant to ensure all aspects of the MoU are obeyed.10
The Islamic Republic responded with both rhetorical condemnation and claims of military counter-escalation. Iran’s Foreign Ministry strongly condemned the US strikes, asserting that the targeting of coastal surveillance facilities on sovereign territory was a direct violation of Article 1 of the MoU and the UN Charter.9 Ebrahim Azizi, head of the Iranian parliament’s National Security and Foreign Policy Commission, criticized the US for attacking amid ongoing negotiations, framing Iran’s initial action against the Ever Lovely not as an escalation, but as “ceasefire management” necessary to enforce Iran’s rightful governance over the Strait.7 Crucially, the IRGC Navy issued a statement claiming they had responded immediately to the US aggression by launching counter-attacks against US military deployment sites in the region.9 While independent OSINT entities have not verified any damage to US assets or personnel, the IRGC warned that “in the event of repeated aggression, our response will be more extensive than this”.9
The risk of a wider regional conflagration remains acute, particularly considering the secondary maritime theater in the Red Sea. While global attention has focused on the Strait of Hormuz, the Iran-backed Houthi rebels in Yemen continue to pose a severe threat to commercial shipping.34 The Houthis have maintained a complete ban on Israeli-linked ships transiting the Red Sea and the Bab el-Mandeb Strait since June 8.35 Furthermore, Houthi leadership has explicitly warned that the group retains the military capability and readiness to resume broader, indiscriminate attacks on commercial shipping in support of Iran if the US continues hostilities against Tehran.37 This dynamic presents the continuous risk of a dual-chokepoint crisis that could cripple global supply chains regardless of the diplomatic outcomes in Switzerland.
The Role and Reactions of Third-Party Countries and Actors
The signing of the MoU and the subsequent military clashes have forced a rapid strategic realignment among key regional and global actors, each attempting to navigate the shifting balance of power in the Middle East.
China: Strategic Beneficiary and Diplomatic Endorser The People’s Republic of China has emerged as one of the primary strategic beneficiaries of the current de-escalation framework.5 Beijing’s overriding geopolitical concern is the preservation of global macroeconomic stability, and the reopening of the Strait of Hormuz directly serves its core interests by ensuring the uninterrupted flow of energy.5 Economically, China has already capitalized on the easing of the US blockade; sellers of Iranian crude have significantly slashed prices for Chinese refiners as millions of barrels of previously restricted oil are shipped out of Hormuz.17
Diplomatically, Beijing has maintained a posture of calculated opportunism—actively supporting the MoU without entangling the People’s Liberation Army in the region’s volatile security architecture. On June 24, Chinese Foreign Minister Wang Yi held a strategic phone conversation with Pakistani Deputy Prime Minister and Foreign Minister Mohammad Ishaq Dar, explicitly thanking Pakistan for its prompt briefings and praising Islamabad’s “key and unique role” in mediating the peace process.38 Chinese Foreign Ministry spokesperson Guo Jiakun publicly stated that the US-Iran MoU sends a “positive signal” to the international community, urging both Washington and Tehran to “work in the same direction for positive results”.12 By vocalizing support for Iran’s sovereignty while heavily endorsing Pakistan’s on-the-ground mediation, China successfully reinforces its preferred international image as a stabilizing, non-interventionist power that reaps the economic rewards of regional peace.5
The United Arab Emirates (UAE) and the GCC: Security Anxiety and Maritime Freedom The Arab states of the Persian Gulf find themselves in a precarious strategic position. Economically, the GCC states are profound winners of the MoU; the reopening of the Strait of Hormuz is essential for their oil and gas exports, mitigating the severe economic slowdowns and inflation triggered by the 70-day naval conflict.5 However, the speed and nature of the US-Iran agreements have simultaneously deepened existential doubts within Gulf capitals regarding Washington’s long-term reliability as a security guarantor.5
This tension was fully displayed on June 25, when a joint GCC-US Ministerial Meeting convened in Manama, Bahrain.11 Co-chaired by US Secretary of State Marco Rubio and Bahraini Foreign Minister Abdullatif bin Rashid Al Zayani, the summit included foreign ministers from all GCC member states, including the UAE.11 While the joint communique welcomed the interim truce, the Arab states drew an absolute red line regarding maritime sovereignty, forcefully rejecting “any tolls, fees, or attempts to assert control” by Iran over the Strait of Hormuz.5 Secretary Rubio attempted to reassure the allies, stating that any final deal must address the full spectrum of Iranian threats, including ballistic missiles and proxy support.5 Yet, skepticism remains high; Dr. Anwar Gargash, diplomatic adviser to the UAE President, publicly expressed concern that Iran may have “over-negotiated” its position, reflecting fears that Tehran extracted too many economic concessions from Washington without fundamentally altering its aggressive regional posture.42
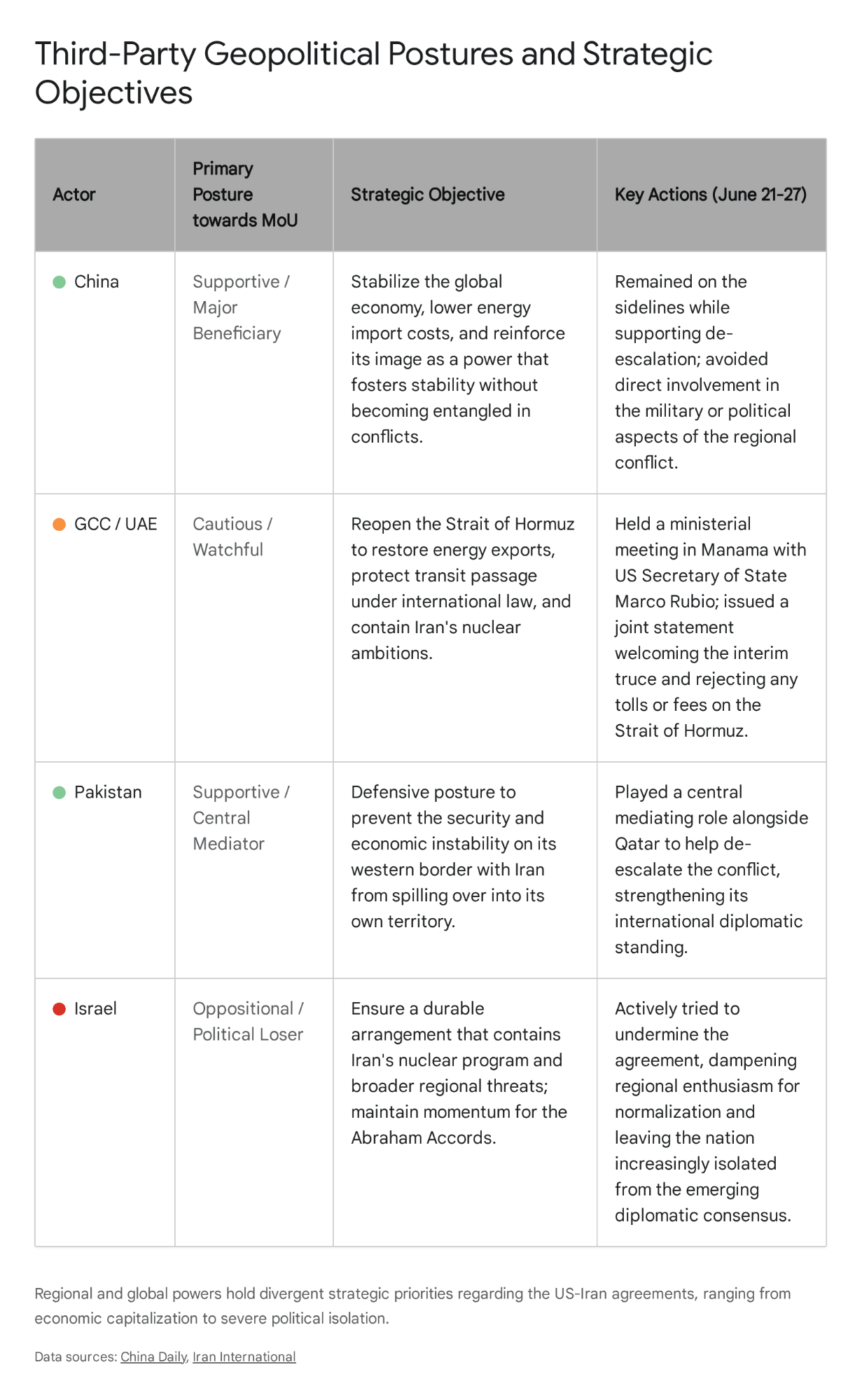
Pakistan: Ascendant Mediator Among regional actors, Pakistan has significantly elevated its diplomatic and geopolitical standing. Operating as a joint mediator alongside Qatar, Pakistan was the vital conduit that prevented the total collapse of talks during the preceding months of war.1 The Pakistani military and civilian leadership, notably Army Chief Asim Munir and Prime Minister Shehbaz Sharif, maintained continuous, personalized channels between Washington and Tehran.1 Islamabad’s credibility as a mediator relies heavily on its unique status as the only nuclear-armed Muslim state, providing it with the necessary gravitas to discuss issues of sovereign enrichment with the Iranian leadership.1 Beyond the prestige of international mediation, Pakistan’s aggressive pursuit of a ceasefire is driven by a critical defensive objective: preventing the severe economic instability, refugee flows, and kinetic violence of the US-Iran conflict from spilling over its shared western border.5
Israel and Russia: Diverging Peripheries Israel has emerged as the principal political loser of the current diplomatic trajectory.5 As the United States and the Arab states pivot their focus entirely toward securing a durable arrangement to contain Iran’s nuclear program and prevent a wider war, Israel has found itself increasingly isolated from the emerging regional diplomatic consensus.5 Prior US hopes to rapidly expand the Abraham Accords have been stalled, and the current Israeli government’s active attempts to undermine the MoU—and its resistance to the US-imposed ceasefire in Lebanon—have further alienated regional partners.3
Finally, the geopolitical impact on the Russian Federation remains mixed.5 The successful reopening of the Strait of Hormuz has reversed the spike in global oil prices, directly cutting into the inflated energy revenues that Moscow was utilizing to fund its own military operations.5 However, from a strategic perspective, the de-escalation of the Middle East conflict reduces the likelihood that Arab states will seek to deepen their military and air defense cooperation with Ukraine, an indirect outcome that the Kremlin views favorably.5
3. Chronological Timeline of Key Events
The following timeline details the most significant, verified geopolitical, diplomatic, and military developments between the United States, Iran, and relevant regional actors over the past seven days, presented in strict ascending chronological order.
- June 21, 2026: Technical negotiations aimed at implementing the 14-point Islamabad Memorandum of Understanding (MoU) officially commence at the Bürgenstock resort above Lake Lucerne in Switzerland. The delegations are led by US Vice President J.D. Vance and Iranian Parliament Speaker Mohammad Bagher Ghalibaf, functioning under the joint mediation of Pakistan and Qatar.1
- June 21, 2026: Following the first full day of talks, negotiators at the Lake Lucerne Summit formally agree to establish a structural oversight framework, including a High-Level Committee, technical working groups, and a dedicated tripartite “Lebanon deconfliction cell” to enforce regional ceasefire parameters.1
- June 22, 2026: The US Department of the Treasury’s Office of Foreign Assets Control (OFAC) issues General License X (GL X). The sweeping measure temporarily authorizes a broad range of transactions involving Iranian-origin petroleum and petrochemical products, effectively reversing the “maximum pressure” doctrine through August 21, 2026.4
- June 23, 2026: Iranian President Masoud Pezeshkian delivers a public address hailing the creation of the Lebanon deconfliction cell as a major, hard-won diplomatic achievement that successfully halted opposing military operations in Lebanese territory.22
- June 23, 2026: The International Maritime Organization (IMO), under Secretary-General Arsenio Dominguez, officially launches the Strait of Hormuz Evacuation Framework, developed in close cooperation with Oman and the UAE to secure commercial shipping routes.6
- June 24, 2026: Chinese Foreign Minister Wang Yi holds a high-level phone conversation with Pakistani Deputy Prime Minister Ishaq Dar. Wang Yi explicitly praises Pakistan’s mediation efforts in the US-Iran talks and reaffirms China’s support for Iranian sovereignty and regional stability.38
- June 25, 2026: A GCC-US Ministerial Meeting is held in Manama, Bahrain, co-chaired by US Secretary of State Marco Rubio and Bahraini Foreign Minister Abdullatif bin Rashid Al Zayani. The assembled delegation issues a joint communique firmly rejecting any Iranian attempts to impose transit tolls or assert unilateral control over the Strait of Hormuz.11
- June 25, 2026 (14:10 UTC): In a direct challenge to maritime freedom, an Iranian IRGC-N one-way attack drone successfully strikes the starboard side of the Singapore-flagged container ship M/V Ever Lovely. The incident occurs as the vessel attempts to exit the Strait of Hormuz using the IMO-backed southern route, approximately 7.5 nautical miles southeast of Dahit, Oman.6
- June 26, 2026: Iran’s Persian Gulf Strait Authority (PGSA) issues a public warning declaring that any commercial vessels transiting outside of its unilaterally designated routes in the Strait of Hormuz will not be guaranteed safe passage, aggressively asserting Iranian administrative control over the waterway.6
- June 26, 2026: In direct kinetic retaliation for the attack on the Ever Lovely, US CENTCOM aircraft conduct targeted airstrikes against sovereign Iranian territory. The strikes successfully destroy coastal radar sites and missile and drone storage locations near the southern port city of Sirik and on Qeshm Island.9
- June 27, 2026: Iran’s Foreign Ministry formally condemns the US airstrikes as a severe violation of the MoU and international law. Concurrently, the IRGC Navy issues a statement claiming to have launched immediate retaliatory strikes against US military deployment sites in the region, warning of broader escalation if provoked.9
Please share the link on Facebook, Forums, with colleagues, etc. Your support is much appreciated and if you have any feedback, please email us in**@*********ps.com. If you’d like to request a report or order a reprint, please click here for the corresponding page to open in new tab.
Sources Used
- Iran-US Relations: Assessing the Bürgenstock Negotiations, accessed June 27, 2026, https://www.specialeurasia.com/2026/06/22/us-iran-burgenstock-negotiations/
- Memorandum of Understanding between the USA and Iran, accessed June 27, 2026, https://www.eda.admin.ch/en/memorandum-of-understanding-between-the-usa-and-iran
- Lebanon ‘deconfliction cell’ emerges after intense Switzerland talks | Iran International, accessed June 27, 2026, https://www.iranintl.com/en/202606224686
- OFAC Issues a General License Authorizing Transactions in Iranian Oil, Petrochemical Products, and Petroleum Products for 60 Days, accessed June 27, 2026, https://www.blankrome.com/news-and-events/ofac-issues-a-general-license-authorizing-transactions-in-iranian-oil-petrochemical-products-and-petroleum-products-for-60-days/
- How a US-Iran deal can reshape the Middle East, accessed June 27, 2026, https://www.iranintl.com/en/202606268920
- Drone Strike on Ever Lovely Exposes the Fiction of a Free Strait – gCaptain, accessed June 27, 2026, https://gcaptain.com/drone-strike-on-ever-lovely-exposes-the-fiction-of-a-free-strait/
- US strikes Iran in response to attack on ship | AP News, accessed June 27, 2026, https://apnews.com/article/iran-us-israel-war-hormuz-strait-june-26-2026-8c1a77eb82d25f00de814958114c7296
- Iran warns ships against using unauthorised routes in Strait of …, accessed June 27, 2026, https://www.middleeastmonitor.com/20260626-iran-warns-ships-against-using-unauthorised-routes-in-strait-of-hormuz/
- Iran war day 120: Tehran condemns US strikes, says it violates MoU …, accessed June 27, 2026, https://www.aljazeera.com/news/2026/6/27/iran-war-day-120-tehran-condemns-us-strikes-says-its-violation-of-mou
- U.S. Strikes Iran in Response to Attack on Commercial Vessel, accessed June 27, 2026, https://www.centcom.mil/MEDIA/PUBLIC-RELEASES/Article/4528341/us-strikes-iran-in-response-to-attack-on-commercial-vessel/
- News, accessed June 27, 2026, https://www.gcc-sg.org/en/MediaCenter/News/Pages/default.aspx?&&p_SortBehavior=0&p_ArticleStartDate=20260502%2021%3A00%3A00&&PageFirstRow=1&&View={08D56BF8-101C-4F4A-AD8F-9009DFC936BD}
- China urges US, Iran to work in ‘same direction for positive results’, accessed June 27, 2026, https://www.aa.com.tr/en/asia-pacific/china-urges-us-iran-to-work-in-same-direction-for-positive-results/3974148
- 2026 Iran war | Deal, Explained, United States, Israel, Strait of Hormuz, Map, & Conflict, accessed June 27, 2026, https://www.britannica.com/event/2026-Iran-war
- 2026 Iran war – Wikipedia, accessed June 27, 2026, https://en.wikipedia.org/wiki/2026_Iran_war
- China says US-Iran MoU sends “positive signal”, accessed June 27, 2026, https://www.aninews.in/news/world/asia/china-says-us-iran-mou-sends-positive-signal20260624163508
- A bad peace: the Arab Gulf states and the US–Iran memorandum of understanding, accessed June 27, 2026, https://www.iiss.org/online-analysis/online-analysis/2026/06/a-bad-peace-the-arab-gulf-states-and-the-usiran-memorandum-of-understanding/
- China says Iran-US MOU can open new path in ties, accessed June 27, 2026, https://www.iranintl.com/en/202606223134
- High-level U.S.-Iran talks conclude with a road map for peace, mediators say, accessed June 27, 2026, https://www.washingtonpost.com/world/2026/06/21/us-iranian-meet-switzerland-hash-out-peace-plan/
- Bürgenstock Resort cancelled 1,200 bookings for US-Iran talks – SWI swissinfo.ch, accessed June 27, 2026, https://www.swissinfo.ch/eng/foreign-affairs/b%C3%BCrgenstock-resort-had-to-cancel-1200-bookings/91639008
- US-Iran set up Lebanon ‘deconfliction cell’. Can it deliver peace, accessed June 27, 2026, https://indianexpress.com/article/world/us-iran-switzerland-talks-lebanon-deconfliction-cell-israel-ceasefire-10752416/
- Lebanon discusses ‘deconfliction’ mechanism ahead of Israel talks | News – Al Jazeera, accessed June 27, 2026, https://www.aljazeera.com/news/2026/6/22/lebanon-discusses-de-confliction-mechanism-ahead-of-israel-talks
- Pezeshkian hails Lebanon deconfliction cell as major achievement, accessed June 27, 2026, https://www.middleeasteye.net/live-blog/live-blog-update/pezeshkian-hails-lebanon-deconfliction-cell-major-achievement
- Issuance of Iran-related General License | Office of Foreign Assets Control, accessed June 27, 2026, https://ofac.treasury.gov/recent-actions/20260622_33
- United States Issues Temporary Authorization for Transactions Involving Iranian-Origin Oil and Petrochemical Products | Thought Leadership | June 2026 | Baker Botts, accessed June 27, 2026, https://www.bakerbotts.com/thought-leadership/publications/2026/june/united-states-issues-temporary-authorization-for-transactions-involving-iranian-origin-oil
- New Iran Authorization Implements Memorandum of Understanding – WilmerHale, accessed June 27, 2026, https://www.wilmerhale.com/en/insights/client-alerts/20260625-new-iran-authorization-implements-memorandum-of-understanding
- US strikes Iran after Strait of Hormuz cargo ship attack as ceasefire tensions escalate, accessed June 27, 2026, https://www.foxnews.com/live-news/iran-drone-strait-of-hormuz-israel-lebanon-conflict-june-26-2026
- US says it struck Iran targets after attack on cargo ship in the strait of Hormuz, accessed June 27, 2026, https://www.theguardian.com/world/2026/jun/26/us-says-it-struck-iran-targets-after-attack-on-cargo-ship-on-the-strait-of-hormuz
- US Airstrikes Hit Iran After It Attacks Ship, Testing Deal, accessed June 27, 2026, https://www.airandspaceforces.com/us-conducts-airstrikes-iran-ship-attack-ceasefire/
- US releases Iran strike video after Tehran drone hits ship in Strait of Hormuz, accessed June 27, 2026, https://indianexpress.com/article/world/us-strikes-iran-mv-ever-lovely-strait-hormuz-ceasefire-june-2026-10759767/
- Day of the Seafarer 2026: Carrying world trade. Carrying the risks., accessed June 27, 2026, https://www.imo.org/en/mediacentre/pressbriefings/pages/day-of-the-seafarer-2026-carrying-global-trade-carrying-the-risks.aspx
- US strikes Iran in response to drone strike on commercial ship, accessed June 27, 2026, https://www.aljazeera.com/news/2026/6/26/us-strikes-iran-in-response-to-drone-strike-on-commercial-ship
- Iran Update Special Report, June 25, 2026 | ISW, accessed June 27, 2026, https://understandingwar.org/research/middle-east/iran-update-special-report-june-25-2026/
- West Asia war LIVE: Iran accuses U.S. of ‘blatant violation’ of peace deal, accessed June 27, 2026, https://www.thehindu.com/news/international/west-asia-war-iran-us-conflict-washington-tehran-ceasefire-strait-of-hormuz-israel-lebanon-peace-deal-live-updates-june-27-2026/article71153161.ece
- 2026-006-Red Sea, Bab el Mandeb Strait, Gulf of Aden, Arabian Sea, and Somali Basin-Houthi Attacks on Commercial Vessels | MARAD – Department of Transportation, accessed June 27, 2026, https://www.maritime.dot.gov/msci/2026-006-red-sea-bab-el-mandeb-strait-gulf-aden-arabian-sea-and-somali-basin-houthi-attacks
- Another Hormuz? The Red Sea’s Threat to the Global Economy, accessed June 27, 2026, https://www.cfr.org/articles/another-hormuz-the-red-seas-threat-to-the-global-economy
- The next Strait of Hormuz crisis could be even worse, accessed June 27, 2026, https://www.chathamhouse.org/2026/06/next-strait-hormuz-crisis-could-be-even-worse
- Yemen, June 2026 Monthly Forecast, accessed June 27, 2026, https://www.securitycouncilreport.org/monthly-forecast/2026-06/yemen-89.php
- Wang Yi Holds a Phone Conversation with Pakistani Deputy Prime Minister and Foreign Minister Mohammad Ishaq Dar_Ministry of Foreign Affairs of the People’s Republic of China, accessed June 27, 2026, https://www.mfa.gov.cn/eng/wjbzhd/202606/t20260626_11953013.html
- China and Pakistan coordinate closely for peace – Friends of …, accessed June 27, 2026, https://socialistchina.org/2026/06/26/china-and-pakistan-coordinate-closely-for-peace/
- Foreign Ministry Spokesperson Lin Jian’s Regular Press Conference on June 18, 2026, accessed June 27, 2026, https://www.iranwatch.org/library/governments/china/ministry-foreign-affairs/foreign-ministry-spokesperson-lin-jians-regular-press-conference-june-18-2026
- Morning Briefing: June 26, 2026, accessed June 27, 2026, https://www.aa.com.tr/en/world/morning-briefing-june-26-2026/3978369
- Iran war latest: US strikes Iran in response to attack on ship transiting Strait of Hormuz, accessed June 27, 2026, https://www.thenationalnews.com/news/mena/2026/06/26/live-us-iran-donald-trump-strait-of-hormuz/?arena_mid=b8h1NcDglJKkQv7U4K5Q&startAfter=1779455265599
- Pakistan PM says US-Iran peace deal signing expected within 24 hours | The Times of Israel, accessed June 27, 2026, https://www.timesofisrael.com/liveblog_entry/pakistan-pm-says-us-iran-peace-deal-signing-expected-within-24-hours/
- Iran-US talks in Switzerland ongoing, delegation expected to “work through the night”: Report, accessed June 27, 2026, https://www.aninews.in/news/world/europe/iran-us-talks-in-switzerland-ongoing-delegation-expected-to-work-through-the-night-report20260622064621
- US strikes Iran in response to attack on cargo ship in Strait of Hormuz, accessed June 27, 2026, https://english.alarabiya.net/amp/News/middle-east/2026/06/27/us-strikes-iran-in-response-to-attack-on-cargo-ship-in-strait-of-hormuz