
1. Executive Summary
The United States Department of Defense (DoD) is engaged in a profound transformation of its force structure, orchestrating a massive expansion of its unmanned aerial systems (UAS) and autonomous drone fleets. Driven by the stark realities of modern peer-to-peer conflict and shifting global threat paradigms, rapid acquisition initiatives such as the T-REX program have drastically accelerated procurement timelines.1 By utilizing commercial off-the-shelf components and streamlined manufacturing processes, these programs are transitioning autonomous platforms from initial concept to physical production in an average of 18 months, a paradigm shift from traditional six-year defense acquisition cycles.1 However, the urgency to scale the physical arsenal risks creating a dangerous strategic blind spot. There is a persistent tendency to fixate on the airframes and payload capacities of individual drones while overlooking the fragile, systemic infrastructure required to navigate, communicate, and operate them effectively in contested airspace.
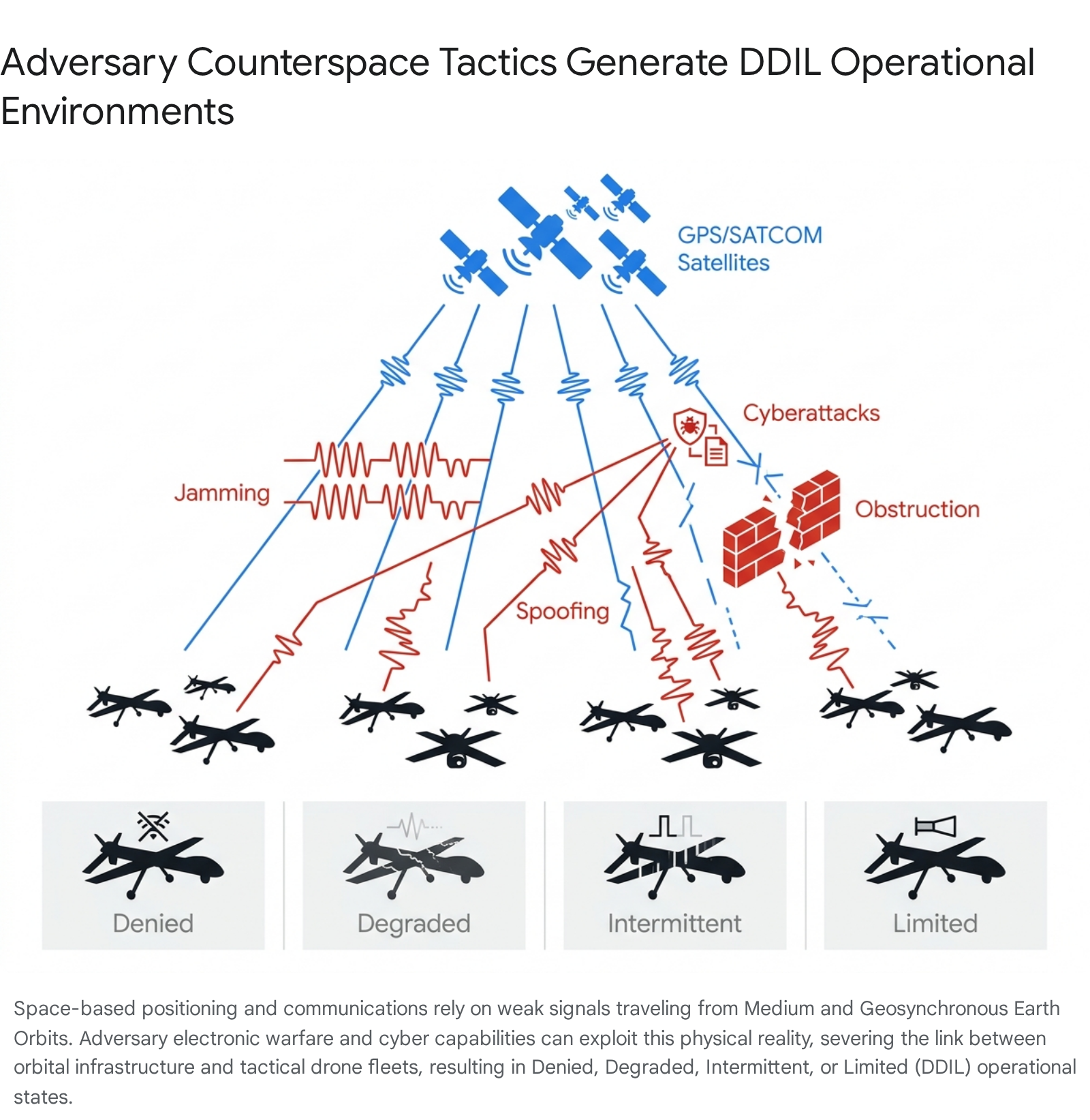
A critical failure point in current strategic planning is the institutional reliance on space-based architectures. The assumption that the Global Positioning System (GPS) and Satellite Communications (SATCOM) will remain consistently available during a conflict with a near-peer adversary is operationally fatal. To successfully enable warfighters and autonomous systems in Denied, Degraded, Intermittent, and Limited (DDIL) environments, DoD leadership must pivot from a posture of space-reliance to one of localized space-resilience through the rapid integration of Assured Position, Navigation, and Timing (A-PNT) technologies.3
This strategic report delivers an in-depth analysis of the systemic requirements necessary to transition DoD drone fleets toward operational independence from vulnerable satellite constellations. It examines the integration of alternative PNT modalities—specifically advanced inertial navigation systems, visual odometry, automated celestial navigation, and signals of opportunity—and details how these technologies must be fused to create ruggedized navigation solutions.5 Crucially, the integration of alternative PNT is not merely a platform-level hardware substitution. It represents a fundamental architectural shift that dictates new requirements across the entire defense capability lifecycle. This encompasses the development of collaborative autonomy and mesh networking to replace continuous SATCOM links, the restructuring of fragile defense industrial base supply chains for specialized optical and quantum components, the implementation of complex predictive maintenance logistics, and the iterative overhaul of operational doctrine and operator training pipelines.7 By addressing these systemic dependencies holistically, leadership can ensure that massive financial investments in drone technology yield resilient, lethal, and legally compliant capabilities in the heavily contested electromagnetic spectrum of future warfare.
2. The Strategic Vulnerability of Space-Based Architectures
For decades, the global superiority of United States military operations has been inextricably linked to the unimpeded access to space-based navigation and communication networks. Initially developed by the DoD in the 1970s to support precision-guided weaponry and battlefield logistics, GPS has evolved into the foundational reference grid for precise geolocation, trajectory planning, and time synchronization across the entire Joint Force.11 Simultaneously, SATCOM enables high-bandwidth, beyond-visual-line-of-sight (BVLOS) command and control, allowing operators operating half a world away to pilot drones and analyze surveillance feeds in real-time. However, the asymmetric advantage historically provided by space dominance is rapidly eroding.
2.1. The Threat Landscape: Electronic Warfare and Space Denial
Adversaries have comprehensively mapped the U.S. military’s dependence on space-based PNT and have dedicated vast resources to developing robust countermeasures to exploit it. GPS signals, transmitted from satellites in Medium Earth Orbit (MEO), are inherently weak by the time they reach the Earth’s surface. Consequently, they are highly susceptible to disruption via low-cost, widely available jamming and spoofing technologies.12 Peer competitors recognize the strategic value of counterspace capabilities; for example, the Defense Intelligence Agency has explicitly noted that nations such as Iran have publicly acknowledged their capabilities to jam space-based communications and GPS signals to deny an adversary the use of space during a conflict.14
The vulnerability of space-based architectures was starkly demonstrated during the opening hours of the Russian invasion of Ukraine in February 2022. The initial assault did not begin with kinetic strikes, but with a sophisticated state-sponsored cyberattack targeting a commercial satellite network. Tens of thousands of satellite modems across Ukraine and Central Europe were knocked offline, deliberately disabling military communications and causing widespread disruption.15 While commercial alternatives like Starlink were rapidly deployed—with over 50,000 terminals ultimately sent to Ukraine to restore battlefield connectivity—adversary forces quickly adapted.15 Russian troops sought the benefits of satellite imagery and communications through the illicit acquisition of Starlink terminals, while simultaneously deploying localized electronic warfare (EW) to degrade network cohesion.15
The resulting operational environment is formally characterized as DDIL, representing a spectrum of communications and navigation degradation.4 In a “Denied” state, no GPS or SATCOM signal is available, leading to a total loss of standard navigation and command fallback. In a “Degraded” state, signals are actively jammed or spoofed, introducing false positioning data that can subtly redirect autonomous systems. “Intermittent” conditions result in unstable signal quality and network drops, reducing the cohesion of drone swarms, while “Limited” environments suffer from constrained bandwidth and latency issues that create payload bottlenecks and slow responses to remote commands.4 Modern UAS must be engineered to survive and operate across all four of these restrictive conditions.
2.2. Legal and Strategic Implications of PNT Degradation
The loss of reliable GPS is not solely a tactical inconvenience that slows down military advances; it carries profound strategic and legal ramifications that can directly impact mission viability. Under the Law of Armed Conflict (LOAC), military commanders are strictly bound by the principle of proportionality. This principle dictates that military action must not cause collateral damage to civilian populations or infrastructure that is excessive relative to the anticipated, concrete military advantage.16 Space-based PNT enables the employment of precision-guided munitions and accurate drone strikes, minimizing civilian casualties and ensuring compliance with international law.
When GPS is denied or manipulated, drones relying on traditional navigation methods may drift significantly off course without the operator’s knowledge. Engaging targets with degraded navigation systems exponentially increases the risk of disproportionate collateral damage, potentially forcing commanders to abort missions entirely or risk committing war crimes.16 Furthermore, as geopolitical rivals establish their own resilient, independent navigation networks—such as the People’s Republic of China’s Beidou system—the strategic advantage historically enjoyed by the U.S. is neutralized. Adversaries operating with functional PNT while U.S. forces operate in the dark possess a decisive maneuver advantage.11 To maintain legal and strategic maneuverability in modern warfare, the ability to sustain precise positioning in a denied environment is an absolute operational prerequisite.
3. The Technological Landscape of Alternative PNT
To mitigate the catastrophic vulnerabilities of space-based architectures, the DoD must aggressively integrate Assured Positioning, Navigation, and Timing (A-PNT) systems across its unmanned fleets. A-PNT is not a single technology acting as a direct backup for when GPS fails; rather, it is a comprehensive, layered approach ensuring reliable and accurate PNT information for critical systems despite intentional interference or environmental challenges.3 While no single complementary PNT capability currently matches the ubiquitous global availability and pinpoint precision of GPS, the strategic fusion of diverse sensor modalities enables drone fleets to operate effectively when space assets are compromised.5
3.1. Advanced Inertial Navigation Systems (INS)
Inertial Navigation Systems form the foundational, autonomous core of a drone’s independent navigation capability. An INS calculates an aircraft’s position, velocity, and orientation by continuously measuring specific force and angular rates using an Inertial Measurement Unit (IMU) comprised of precision accelerometers and gyroscopes.6 Because an INS is entirely self-contained, requires no external signals to operate, and emits no electromagnetic signature, it is fundamentally immune to external radio frequency jamming, spoofing, or cyber interception.18
However, the primary vulnerability of all classical inertial sensors is accumulated drift over time. Because an INS calculates current position based on past measurements, minute sensor errors compound rapidly, causing the calculated trajectory to diverge from the true physical location unless periodically corrected by an external reference.19 The performance, and thus the strategic utility, of an INS is heavily dependent on its component grade, which dictates its Size, Weight, Power, and Cost (SWaP-C) profile.17
At the highest tier, Marine and Navigation grade inertial systems utilize advanced ring laser or Fiber Optic Gyroscopes (FOG). Systems such as the high-precision FOG GNSS/INS platforms produced by Advanced Navigation or FIBERPRO offer exceptional bias stability, with un-aided navigation solutions drifting less than 1.8 kilometers per day.8 However, these systems are prohibitively large, power-hungry, and can cost upwards of one million dollars, rendering them entirely unsuitable for the majority of tactical, attritable drone platforms.17
Conversely, modern tactical drone systems rely heavily on Micro-Electromechanical Systems (MEMS). While traditionally prone to higher drift rates, significant industrial advancements have militarized MEMS technology. Solutions such as the VectorNav tactical IMU and INS platforms now integrate high-G sensors, including 90G and 250G accelerometers and 4000°/sec gyroscopes, supporting reliable navigation for high-speed interceptors and counter-UAS applications in extreme vibration environments.18 Similarly, SWaP-optimized tactical-grade Attitude and Heading Reference Systems (AHRS) provide critical, resilient baselines for smaller platforms.8 Yet, even the most advanced MEMS systems require supplementary inputs on extended missions to bound positional error.
3.2. Quantum Sensing Horizons
The long-term strategic horizon for un-aided inertial navigation lies in the rapid operationalization of quantum sensing. Leveraging the immutable physical properties of atoms, quantum sensors offer measurement precision and long-term accuracy that far surpass classical mechanical or optical sensors.20 Quantum inertial sensors, utilizing sophisticated atom interferometer technology, track movement with stability rates that are more than ten times longer than classical sensors, exponentially increasing the duration a drone can maintain precise navigation without requiring external GPS updates.19
While highly stable atomic clocks—the most mature quantum technology—already form the backbone of the GPS constellation itself, miniaturized next-generation optical atomic clocks and quantum accelerometers are beginning to transition from laboratory environments into deployable hardware.19 The development of quantum PNT is an urgent, existential national security priority. If near-peer adversaries, such as China, surpass the U.S. in quantum sensing and eliminate their military’s need for GNSS signals in combat, they will gain an insurmountable asymmetrical advantage.19
3.3. Visual Odometry and Vision-Aided Navigation
To counteract the inherent drift of inertial sensors, drones increasingly rely on visual odometry. This technique allows an unmanned system to navigate by continuously analyzing sequential images from onboard optical cameras or LiDAR arrays to estimate its own ego-motion relative to the environment.6 By tracking the displacement of specific visual cues—such as terrain contours, building edges, or man-made infrastructure—algorithms can accurately calculate the aircraft’s relative movement.6
Modern visual odometry relies on highly complex feature extraction and matching methodologies, such as the Scale-Invariant Feature Transform (SIFT) algorithm, which displays scale and rotation independence when tracking environmental landmarks.22 Commercial Visual-Inertial Odometry (VIO) systems have matured rapidly, driven by the augmented reality and autonomous vehicle sectors. Proprietary platforms like Apple ARKit, Google ARCore, Intel RealSense T265, and Stereolabs ZED 2 have proven to be cost-effective, off-the-shelf sensors for estimating six-degree-of-freedom (6-DoF) ego-motion, with systems like ARKit demonstrating drift errors as low as 0.02 meters per second in controlled environments.21
When visual odometry is formally integrated with tactical inertial data, it creates a ruggedized Visual Inertial Navigation System (VINS).24 Companies such as Inertial Labs have demonstrated VINS architectures that combine inertial sensing with visual odometry to significantly improve UAV navigation accuracy and reduce drift in GNSS-denied and contested operational environments.18 Advanced autopilots, such as those developed by Embention, now feature embedded vision capabilities specifically tailored for loitering munitions and precision targeting.18 Furthermore, multi-sensor Extended Kalman Filter (EKF) suites, like those pioneered by Samsung, intelligently fuse visual odometry, downward cameras, and lateral positioning cues to deliver centimeter-level Simultaneous Localization and Mapping (SLAM) accuracy in indoor or subterranean spaces without requiring pre-mission mapping.25
Despite its high accuracy, visual odometry faces distinct operational constraints. It requires adequate ambient illumination and is severely degraded by adverse weather conditions, including heavy rain, cloud cover, fog, or battlefield smoke.26 Furthermore, visual algorithms struggle to maintain locks in environments lacking distinct static features, such as over open ocean expanses or featureless deserts.21 In dynamic operational environments—such as launching a drone from the deck of a moving naval vessel or ground vehicle—the system must employ context-aware logic to mathematically differentiate between the movement of the carrier platform and the drone’s own flight dynamics, adding significant computational overhead.25
3.4. Automated Celestial Navigation
Celestial navigation, one of the oldest methods of wayfinding, has been fully modernized for autonomous UAS integration. Modern digital celestial compasses and star trackers—such as the SkyPASS system developed by Polaris Sensor Technologies—utilize stabilized or strapdown optical telescopes paired with inertial sensors to observe the positions of stars, track the sun and moon, and measure sky polarization.27 By comparing the exact observed angles of these celestial bodies against an internal digital almanac and a highly precise atomic clock, the system can calculate an absolute global position and heading without any reliance on terrestrial or satellite radio frequency signals.27
Historically, autonomous star trackers were heavy and voluminous devices, restricting their deployment to strategic bombers, intercontinental ballistic missiles, or space probes. However, recent advancements have dramatically reduced their SWaP-C profiles. Modern concept designs feature low-noise CMOS focal plane arrays within telescopes measuring just 310 mm in length, occupying less than 1300 cubic centimeters of volume, and weighing under one kilogram.30 The SkyPASS Gen3-N model, for instance, provides static heading accuracy to within 2 mil (0.11º) and dynamic accuracy to 4 mil (0.23º), all while consuming a mere 4.1 Watts of power in a compact 20-ounce package.28 Furthermore, integrated frameworks like Honeywell’s Celestial Aided Navigation (HANA) ensure seamless integration with other modalities, providing GPS-like accuracy with passive, jamming-resistant performance.31
Celestial navigation represents one of the only passive, non-emissive modalities capable of providing absolute global positioning over featureless terrain or oceans, effectively correcting INS drift on long-endurance, high-altitude missions.27 However, its primary operational constraint is meteorological; traditional star trackers require line-of-sight to the sky and are rendered ineffective by heavy cloud cover or atmospheric haze, necessitating tight integration with inertial sensors to ensure continuous operation when the sky is obscured.26
3.5. Low Earth Orbit PNT and Signals of Opportunity
Beyond onboard sensors, military fleets can leverage alternative RF signals to augment navigation. While MEO-based GPS is highly vulnerable, organizations are increasingly turning to independent, authenticated Low Earth Orbit (LEO) satellite networks for PNT data. Systems like Iridium PNT deliver a crucial advantage in degraded environments due to signal strength. Because the Iridium constellation operates roughly 25 times closer to the Earth than traditional GNSS satellites, its downlink can be received at ground level at around 1,000 times (≈30 dB) the strength of standard GPS signals.13 This significantly higher received power inherently raises the bar for adversary interference, supports operation in heavily obstructed environments like urban canyons, and helps sustain trusted timing and position data when standard GPS is jammed.13 Solutions like the RockBLOCK APNT provide rapid retrofit paths to encapsulate Iridium PNT without requiring the multi-year redesign of legacy airframes.13
Additionally, alternative modalities such as magnetic anomaly navigation and terrestrial signals of opportunity provide vital layered redundancy. Magnetic navigation measures anomalies in the Earth’s magnetic field against pre-loaded magnetic maps, providing absolute positioning to within 100 meters.26 However, this method requires highly accurate environmental maps and must filter out electromagnetic noise generated by the drone’s own motors and avionics.26 Terrestrial radio frequency signals, such as Very Low Frequency (VLF) broadcasts, can also provide alternative positioning, though typically with lower accuracy (e.g., 500 meters) and are geographically constrained by the availability of transmitting infrastructure.26
3.6. Multi-Modal Sensor Fusion Architectures
No single Alternative PNT technology serves as a universal panacea for the DDIL environment. The foundation of resilient military drone operations is a robust, multi-modal sensor fusion architecture. Sophisticated algorithmic frameworks, primarily utilizing Extended Kalman Filters (EKF), continuously ingest high-frequency data streams from the IMU, visual odometry cameras, celestial trackers, magnetic sensors, and altimeters.3
The fusion engine dynamically evaluates the confidence level and error profile of each sensor stream based on the immediate operational context. For instance, the system will heavily weight visual odometry data while navigating through an urban environment during daylight, seamlessly transition to relying on celestial navigation upon ascending to high-altitude night flights, and fall back purely on high-grade inertial holdover when navigating through dense cloud cover or maritime fog. This layered, context-aware approach ensures that the localized degradation or failure of any single sensor modality does not compromise the overall mission integrity.3
| Alternative PNT Modality | Primary Operating Mechanism | Key Operational Advantages | Environmental & Technical Limitations | SWaP-C & Lifecycle Profile |
| Inertial Navigation (INS) | Integrates acceleration and rotation data (IMU) outward from a known starting point.6 | Fully autonomous; zero RF emissions; immune to jamming/spoofing; operates in all weather.18 | Accumulates physical drift over time; requires external positional updates for long-duration missions.19 | Varies widely. Tactical MEMS are low-SWaP; Marine FOGs are extremely heavy and expensive ($1M+).17 |
| Visual Odometry (VINS) | Tracks environmental features and landmarks via optical cameras or LiDAR sensors.6 | Excellent for bounding INS drift; highly effective in complex urban, indoor, or subterranean spaces.24 | Degraded by poor lighting, smoke, fog, and featureless terrain (e.g., open water, deserts).21 | High computational load; relies on low-SWaP cameras but requires powerful edge processing for SLAM.21 |
| Celestial Navigation | Tracks stars, sun, moon, and measures sky polarization vectors.28 | Provides absolute global position without RF emissions; excellent for long-endurance over-ocean flights.27 | Requires direct line-of-sight to the sky; severely degraded by heavy cloud cover or dense atmospheric haze.26 | Rapidly improving. Modern strapdown trackers are under 1kg, require low power (e.g., 4.1W), and are highly cost-effective.27 |
| Quantum Sensing | Utilizes advanced atom interferometry for ultra-precise measurement of physical forces.20 | Unprecedented bias stability; extends INS holdover times by orders of magnitude.19 | Currently a nascent technology; actively transitioning from controlled lab environments to ruggedized field deployment.19 | Currently high SWaP-C, but rapid commercialization efforts aim to miniaturize components for tactical use.19 |
| LEO PNT (e.g., Iridium) | Leverages low Earth orbit satellite networks for timing and positioning.13 | Signals are 1000x (30dB) stronger than GPS; highly resistant to standard jamming.13 | Still relies on an external space-based architecture, retaining some vulnerability to advanced ASAT or cyber threats.13 | Easy to integrate via compact, self-contained modems (e.g., RockBLOCK) without platform redesign.13 |
4. Systemic Integration: Architecture and Collaborative Autonomy
Transitioning from GPS dependency to Alternative PNT cannot be isolated merely to the hardware layer of individual drones. The operational concept of unmanned aviation must fundamentally change. If a drone fleet loses access to both SATCOM and GPS, traditional command and control methodologies—which demand continuous, high-bandwidth telemetry links and dedicated sensor operators—will instantaneously collapse.7 To survive, the DoD must field systemic software architectures that enable drone fleets to operate decisively with intermittent, degraded, or zero reach-back to human controllers.
4.1. The Shift to Collaborative Autonomy
The Defense Advanced Research Projects Agency (DARPA) Collaborative Operations in Denied Environment (CODE) program exemplifies the necessary shift in operational architecture. The CODE program aims to transform UAS operations from a legacy model requiring multiple human operators per vehicle to a paradigm of “collaborative autonomy,” where a single mission commander exerts high-level supervisory control over an entire swarm of unmanned assets.7
In a DDIL environment, CODE-enabled drones continuously evaluate their own states and their surroundings using A-PNT and onboard sensor fusion.7 They generate a shared situational awareness picture and present coordinated recommendations for tactical actions to the mission supervisor.7 Crucially, if long-haul communications are severed by electronic warfare, the swarm does not return to base or hold position indefinitely. Instead, the drones can autonomously execute pre-approved rules of engagement, finding and engaging targets as appropriate.7 The swarm dynamically adapts to fluid battlefield variables, reallocating resources in response to the sudden emergence of air defenses or the attrition of friendly units.7
This architectural shift from continuous manual control to supervisory intent drastically reduces the bandwidth required for C2. Commanders can mix and match different systems with specific capabilities (e.g., electronic attack, ISR, kinetic strike) to suit individual missions, eliminating the dependence on a single, highly integrated UAS, the loss of which would be mission-catastrophic.7
4.2. Resilient Mesh Networks and MANETs
To support collaborative autonomy without relying on vulnerable satellite links, the fleet must possess the capability to establish its own localized, infrastructure-independent communication network. Mobile Ad Hoc Networks (MANETs) and dynamic mesh networking allow individual drones, ground vehicles, and soldier units to act simultaneously as data endpoints and routing relays.34 In a decentralized mesh network, there is no single point of failure; if a drone is destroyed by kinetic action or heavily jammed, the network automatically and instantaneously reroutes telemetry, targeting data, and C2 instructions through surviving nodes to maintain operational cohesion.34
Militaries are increasingly experimenting with turning drones into flying relay nodes to “extend and thicken” tactical networks over vast distances. During one U.S. Army exercise, a single solar-powered drone operating at 18,000 feet provided mesh network coverage spanning an area roughly the size of Rhode Island.34 For highly contested, GPS-denied zones—such as urban canyons or subterranean environments—tactical mesh networks are paired with millimeter-wave (mmWave) technology to enable resilient, low-latency, and low-signature connectivity.4
Advanced networking solutions, such as the Dynamic Cognitive Multi-modal Mesh developed by Fly4Future, ensure seamless connectivity within extensive heterogeneous teams of multiple robots, including Unmanned Aerial Vehicles (UAVs), Unmanned Ground Vehicles (UGVs), and Unmanned Surface Vehicles (USVs).35 By seamlessly shifting between highly directional mmWave RF, standard RF data links, and secure optical communications, these networks guarantee that the swarm maintains internal cohesion and data-sharing despite intense, localized electronic warfare.35 At the software layer, integration relies on flexible protocols such as MAVLink, where open-source autopilot firmware like ArduPilot is modified to utilize tools like Mavproxy and UDP routing, ensuring that custom, GPS-denied navigation data can override standard flight routines.36
5. Securing the Defense Industrial Base and Supply Chain
The aggressive expansion of DoD drone fleets exposes deep and critical vulnerabilities within the United States defense industrial base. The strategic tendency to fixate on the final assembled airframe and its kinetic payload often obscures the fragile, highly specialized supply chains responsible for the complex sub-components required for Alternative PNT systems. A recent assessment by the Reagan Institute’s National Security Innovation Base report card highlighted that despite the Pentagon’s aspirations to scale technology and work with non-traditional vendors, persistent manufacturing capacity, resourcing, and workforce challenges mean that modernization is “not revealing itself across the force” at the required pace.37
5.1. Production Bottlenecks in Advanced Navigation Sensors
The procurement of high-performance Inertial Navigation Systems, particularly those built around highly accurate Fiber Optic Gyroscope (FOG) technology, is severely constrained by legacy manufacturing processes. Traditional FOG production relies heavily on manual coil-winding techniques that demand highly specialized workforce expertise and frequently suffer from lower yield rates.8 In addition, legacy suppliers often rely on fragmented supply chains, sourcing critical components such as specialized optical glass, photonic chips, and precision housings from multiple third-party vendors.8
Consequently, lead times for these critical sensors can stretch up to 24 months.8 This protracted timeline is fundamentally misaligned with rapid acquisition initiatives like the T-REX program, which mandates moving autonomous prototypes from concept to field-ready production in just 18 months.1 Furthermore, when manufacturing capacity is tightly constrained, legacy suppliers inherently prioritize large, lucrative platforms such as naval vessels or manned fighter aircraft, leaving high-volume, expendable drone programs starved for necessary components.8
To overcome these structural deficits, DoD acquisition strategies must actively incentivize and prioritize vertically integrated manufacturing within the PNT sector. Suppliers that control the entire manufacturing process in-house—from precision component production and optical engineering through to final INS integration—can maintain strict quality control, eliminate dependencies on fragile third-party vendors, and drastically shorten delivery timelines.8 For example, Advanced Navigation’s vertically integrated approach, supported by a recent $110 million Series C funding round to scale PNT technologies, demonstrates how dedicated capital can resolve capacity constraints and deliver sovereign, GPS-independent technologies at scale.8
5.2. Market Making for Quantum and Strict Cybersecurity Standards
The U.S. government must aggressively utilize its monopsony purchasing power to accelerate the commercialization of emerging PNT technologies. The quantum sensing market, which holds the key to long-term inertial resilience, cannot survive on commercial demand alone; the DoD must actively fund and integrate quantum prototypes to mature the technology.19 Innovative programs, such as SpaceWERX’s Alternative PNT initiative—which seeks proposals to improve resilience and awards Small Business Innovation Research contracts to prototype PNT technologies—are vital mechanisms for driving this industrial maturation.11
Simultaneously, the integration of new sensors must adhere to uncompromising cybersecurity and supply chain integrity standards. The Blue UAS framework establishes stringent compliance baselines, requiring zero-trust architecture principles that verify every system interaction, encrypted storage for all mission data, and secure update mechanisms to maintain protection against evolving cyber threats.38 Crucially, Blue UAS certification mandates compliance with National Defense Authorization Act (NDAA) Section 848 supply chain requirements, strictly prohibiting the use of components sourced from restricted nations.38 While the commercial Green UAS standard provides a baseline, Blue UAS requires comprehensive vetting of the entire supply chain to ensure operational performance in defense contexts.38 Securing a domestic or highly trusted allied supply chain for the micro-components within Alt-PNT sensors is a strategic necessity to prevent adversaries from embedding latent hardware vulnerabilities into the U.S. military’s navigation grid.
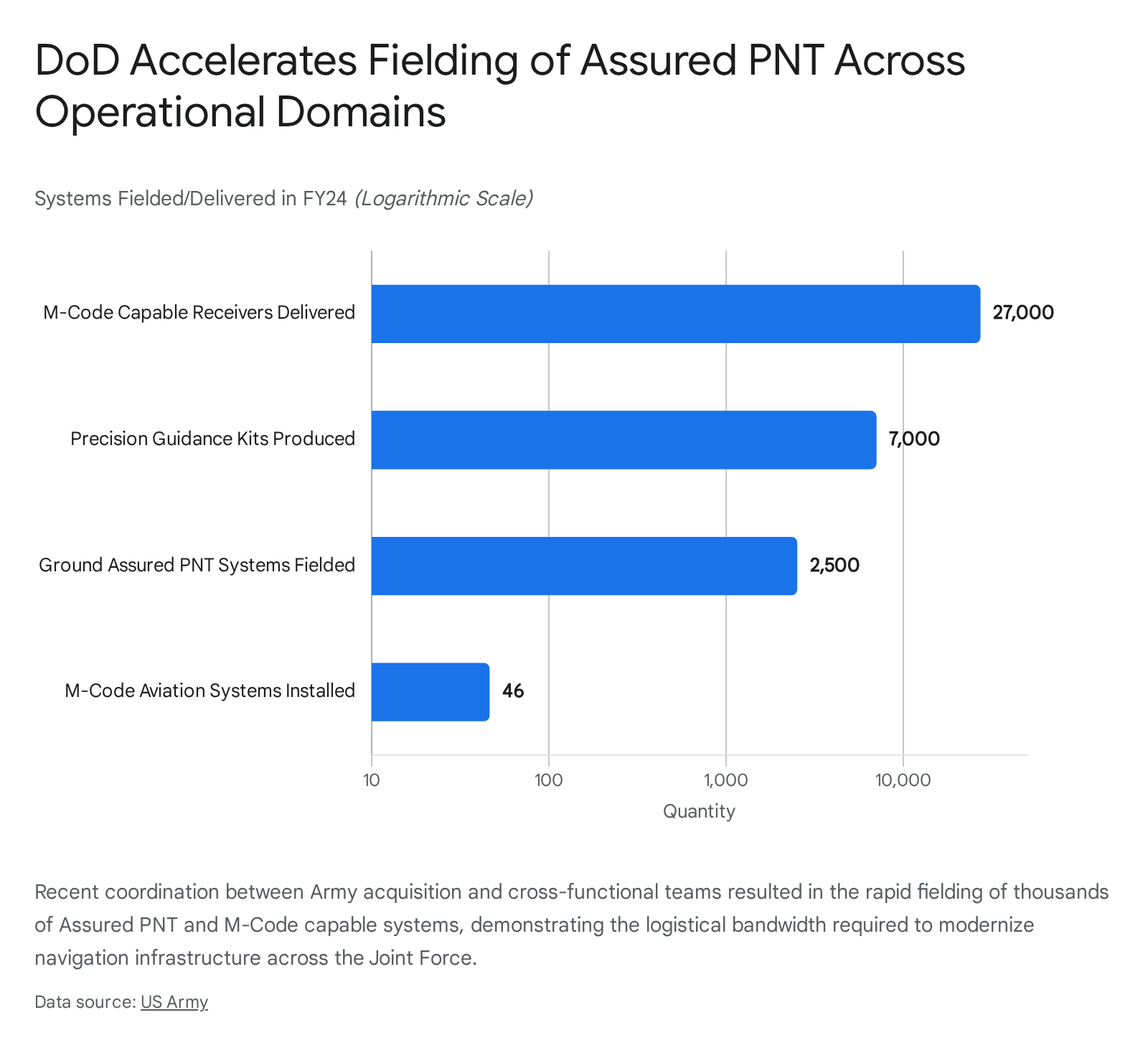
The magnitude of this transition is already evident in ongoing modernization efforts. Coordinated initiatives between Project Manager PNT, PM Aviation Mission Systems Architecture, and the All-Domain Sensing Cross-Functional Team have dramatically increased the speed of acquisition.39 By combining experimentation events and sharing test data, the Army successfully delivered approximately 27,000 M-code-capable receivers, fielded over 2,500 ground Assured PNT systems, produced 7,000 precision guidance kits, and installed 46 advanced aviation navigation systems in a single fiscal year.40 This scale of deployment underscores that transitioning to resilient PNT requires a massive, sustained mobilization of acquisition resources.
6. Lifecycle Management and Logistical Sustainment
Deploying massive fleets of drones equipped with complex, multi-modal PNT suites exponentially increases the friction of lifecycle management and field logistics. Traditional UAS maintenance schedules focused heavily on propulsion systems, airframe integrity, and basic avionics. The introduction of highly sensitive optical arrays, precise inertial measurement units, and celestial tracking telescopes demands a rigorous, continuous, and data-driven approach to sustainment.10 The drone industry already suffers from failure rates significantly higher than those of manned aircraft; introducing delicate sensors into harsh combat environments exacerbates this operational risk.42
6.1. The Burden of Continuous Calibration
The strategic utility and accuracy of Alternative PNT systems are entirely dependent on meticulous, continuous calibration. For visual odometry and VINS to function, the physical alignment of optical sensors must be perfect. Gimbal mechanisms require regular, quarterly calibration, as well as immediate recalibration following any hard landings or physical impacts; even minor mechanical misalignments, such as a slightly tilted horizon, introduce severe mathematical errors during SLAM processing, rapidly degrading positional accuracy.41 Furthermore, complex vision and obstacle avoidance sensors must be frequently tuned to ensure hovering precision.43
Inertial sensors present an even more persistent logistical burden. The IMU and internal compasses must be deeply recalibrated following any firmware updates, physical jolts, or relocation to new operational theaters characterized by different local magnetic deviations.41
For advanced celestial navigation systems, ensuring accuracy requires highly specialized, hardware-heavy testing environments. The verification and calibration of star trackers cannot be conducted via simple software diagnostic checks on a flightline. It requires the deployment of hardware-in-the-loop optical stimulators capable of accurately emulating the precise geometric and radiometric characteristics of stellar objects and space debris across a high-dynamic range.44 Furthermore, advanced mathematical approaches must be integrated directly into the maintenance software architecture. On-orbit or in-flight calibration utilizes methods such as Singular-Value Decomposition (SVD) and Extended Kalman Filters to continually estimate and correct systematic errors, effectively uncoupling the drift between the star tracker parameters and the gyroscope units without relying solely on the angular distance between stars.32 If forward-deployed ground support equipment and maintenance personnel are not trained or equipped to handle these advanced mathematical and optical calibration requirements, the drone fleet’s navigation accuracy will rapidly degrade to unacceptable levels in the field.
6.2. Proactive Fleet Maintenance Operations
To maintain high mission availability rates across rapidly expanding drone fleets, DoD logistics commanders must pivot from reactive to proactive, predictive maintenance strategies. Waiting to repair sensors only after they fail results in unacceptable mission downtime, compromised objectives, and heightened safety risks.10
Fleet Maintenance Managers must utilize centralized software platforms to monitor the precise health of PNT components across thousands of airframes. This requires a structured approach to tracking performance metrics. For example, battery management systems require per-flight and monthly deep checks, core motor and bearing inspections must occur every 100 flight hours, and propeller balancing must be executed every 50 hours.41 By strictly adhering to these schedules and scheduling preventative downtime for IMU deep-checks and sensor recalibrations before failure occurs, logistical pipelines can cut overall maintenance costs by 18-25% and reduce equipment downtime by up to 50%.10 Furthermore, predictive modeling ensures that highly specialized, long-lead-time replacement parts—such as bespoke optical lenses for celestial trackers or precision MEMS accelerometers—are identified and stocked at forward operating bases well in advance.10
7. Evolving Doctrine, Training, and Human-Machine Teaming
The final, and perhaps most challenging, systemic requirement for integrating Alternative PNT and autonomous drone fleets is the evolution of the human element. For over two decades, the United States military has conducted counter-terrorism and counter-insurgency operations in highly permissive electromagnetic environments, relying heavily on uncontested SATCOM and GPS to target extremist groups.47 A transition to major combat operations against a near-peer adversary requires a fundamental restructuring of operational doctrine, risk acceptance, and operator training pipelines to prepare forces for the realities of the DDIL battlefield.
7.1. Iterative Doctrinal Updates
The DoD has recognized that the rapid pace of drone technological advancement, driven by global conflicts such as the Russo-Ukrainian War, far outstrips traditional, multi-year doctrinal writing cycles.9 Consequently, the military is shifting toward an iterative, “learn-by-doing” approach to force-wide doctrine.9 Achieving “drone dominance” is now a stated War Department priority, and as new Alt-PNT systems and autonomous capabilities are rapidly fielded, operational units validate their effectiveness in the field.9 This real-world experience flows directly into rapid updates of core texts, such as the Army’s capstone operations manual, Field Manual (FM) 3-0.9
New doctrinal imperatives explicitly address the lethal realities of contested environments, introducing core concepts such as the need to “protect against constant observation” and to “make contact with sensors, unmanned systems, or the smallest element possible”.9 Leadership must ensure that the doctrine governing both special operations and conventional forces explicitly outlines the employment of massive fleets of small, resilient drones in major combat operations, moving beyond the legacy focus on large, theater-level, highly vulnerable assets like the MQ-9 Reaper or RQ-4 Global Hawk.47
7.2. Revamping the Training Pipeline
Adversaries understand that the most effective way to neutralize a sophisticated drone capability is often the simplest: target the pilot or disrupt the pilot training pipeline.48 Therefore, the DoD must rigorously train operators to function effectively under severe cognitive load in environments where automation acts unpredictably due to sensor degradation or network isolation.
To achieve this, military training centers, such as the U.S. Army John F. Kennedy Special Warfare Center and School, are urgently expanding electronic warfare training programs.49 Commanders are actively requesting that government regulators expand domestic areas where the military is authorized to actively jam cellular and GPS signals.49 Training must simulate the ubiquitous, high-powered jamming that characterizes modern warfare, forcing operators to execute missions using fiber-optic tethers, autonomous machine-vision targeting, and Alternative PNT modalities.49
New specialized courses, such as those for tactical signal intelligence and electronic warfare, alongside the creation of dedicated robotics detachments and robot technician specialties, are institutionalizing the expertise required to manage these complex systems.49 In these simulated DDIL environments, operators learn the critical nuances of human-machine teaming: when to trust an inertial readout drifting over time, how to manage collaborative autonomy swarms with intermittent mesh-network connectivity, and how to execute commander’s intent when primary C2 links are severed.49
Simultaneously, broader integration of drone operations within domestic airspace, guided by civilian bodies like the FAA through rulemakings such as the Normalizing Unmanned Aircraft Systems Beyond Visual Line of Sight Operations (BVLOS), highlights the growing complexity of airspace management.51 As military operators train to coordinate massive fleets, they require intricate knowledge of how C2 systems transmit commands and account for the variability of airspace restrictions and traffic density, ensuring that both training and operational deployments minimize collision risks and maximize airspace efficiency.51
8. Conclusion
The Department of Defense’s massive investments in drone technology and autonomous systems represent a critical, overdue modernization of the Joint Force. However, fixating solely on the aerodynamic performance, range, or payload capacity of a new airframe ignores the unseen, systemic vulnerabilities that ultimately dictate its effectiveness in combat. In a peer-to-peer conflict, the space-based architectures that have historically enabled United States precision strike and global connectivity will be relentlessly contested, degraded, and denied by sophisticated adversaries.
To guarantee operational success and strictly adhere to the Law of Armed Conflict, DoD leadership must champion the comprehensive integration of Assured PNT technologies—fusing advanced inertial sensors, quantum accelerometers, visual odometry, and celestial navigation to create robust, environmentally independent platforms. Yet, this technological integration is only the vanguard of a much broader institutional transformation.
True resilience requires shifting command and control architectures away from continuous human oversight toward collaborative autonomy and dynamic mesh networking. It demands a rigorous restructuring of the defense industrial base to eliminate production bottlenecks and secure fragile supply chains for critical optical and quantum components. It necessitates data-driven lifecycle management and advanced mathematical calibration to sustain complex sensor arrays in austere environments. Finally, it requires an uncompromising overhaul of operational doctrine and operator training, preparing warfighters to act decisively alongside autonomous systems when the space domain goes dark. By addressing these systemic requirements holistically and immediately, the DoD can ensure its massive investments yield drone fleets that deliver lethal, resilient dominance on the battlefields of tomorrow.
Please share the link on Facebook, Forums, with colleagues, etc. Your support is much appreciated and if you have any feedback, please email us in**@*********ps.com. If you’d like to request a report or order a reprint, please click here for the corresponding page to open in new tab.
Sources Used
- DoD Moves Forward in Plans to Grow Drone Fleet – MeriTalk, accessed April 24, 2026, https://www.meritalk.com/articles/dod-moves-forward-in-plans-to-grow-drone-fleet/
- Pentagon seeks to surge its multi-domain drone arsenal | DefenseScoop, accessed April 24, 2026, https://defensescoop.com/2025/07/16/pentagon-seeks-to-surge-its-multi-domain-drone-arsenal/
- Assured PNT: Military’s Solution to GPS-Denied Navigation – PNI Sensor, accessed April 24, 2026, https://www.pnisensor.com/the-importance-of-assured-pnt-to-the-us-military/
- Drone Comms in GPS-Denied Environments: Tactical Mesh Solutions, accessed April 24, 2026, https://www.bluwireless.com/insight/gps-denied-drone-communications/
- Quantum vs. Classical Complementary PNT – Mitre, accessed April 24, 2026, https://www.mitre.org/sites/default/files/2024-06/PR-23-0577-Quantum-vs-Classical-Complementary-PNT.pdf
- GPS Denied Navigation: Advancing Flight Control Systems, accessed April 24, 2026, https://www.uavnavigation.com/company/blog/gps-denied-navigation-advancing-flight-control-systems
- CODE: Collaborative Operations in Denied Environment – DARPA, accessed April 24, 2026, https://www.darpa.mil/research/programs/collaborative-operations-in-denied-environment
- Addressing INS Supply Chain Challenges for UAVs – Unmanned Systems Technology, accessed April 24, 2026, https://www.unmannedsystemstechnology.com/feature/addressing-ins-supply-chain-challenges-for-uavs/
- Army adapts doctrine force-wide, integrating drone lessons to achieve ‘drone dominance, accessed April 24, 2026, https://www.army.mil/article/291361/army_adapts_doctrine_force_wide_integrating_drone_lessons_to_achieve_drone_dominance
- Your fleet maintenance manager – Guide to Drone Fleet Upkeep, accessed April 24, 2026, https://blog.dronedesk.io/fleet-maintenance-manager/
- America’s Asymmetric Vulnerability to Navigation Warfare …, accessed April 24, 2026, https://nssaspace.org/wp-content/uploads/2024/07/NAVWAR-FINAL.pdf
- The Hidden Vulnerability – America’s GPS Dependency as a National Security and Economic Risk | SandboxAQ, accessed April 24, 2026, https://www.sandboxaq.com/post/the-hidden-vulnerability-americas-gps-dependency-as-a-national-security-and-economic-risk
- The True Cost of GPS Denial and the Case for A-PNT Resilience – Ground Control, accessed April 24, 2026, https://www.groundcontrol.com/blog/the-true-cost-of-gps-denial-and-the-case-for-a-pnt-resilience/
- NAVAL POSTGRADUATE SCHOOL THESIS – DTIC, accessed April 24, 2026, https://apps.dtic.mil/sti/trecms/pdf/AD1225335.pdf
- Extending the Battlespace to Space – CSIS, accessed April 24, 2026, https://www.csis.org/analysis/chapter-8-extending-battlespace-space
- Prohibiting Interference with Space-Based Position, Navigation, and Timing – Air University, accessed April 24, 2026, https://www.airuniversity.af.edu/Portals/10/SSQ/documents/Volume-10_Issue-4/Kasku.pdf
- How to Choose The Right Inertial Sensor for Your Build, accessed April 24, 2026, https://inertialsense.com/choosing-inertial-sensors-your-build/
- GNSS Denied Navigation Technology for Unmanned Platforms, accessed April 24, 2026, https://www.unmannedsystemstechnology.com/expo/gps-gnss-denied-navigation-positioning/
- How Quantum Sensing Will Help Solve GPS Denial in Warfare – Center for Global Security Research, accessed April 24, 2026, https://cgsr.llnl.gov/sites/cgsr/files/2025-06/Burkey_QS_final.pdf
- Atomic Advantage | CNAS, accessed April 24, 2026, https://www.cnas.org/publications/reports/atomic-advantage
- A Benchmark Comparison of Four Off-the-Shelf Proprietary Visual–Inertial Odometry Systems – PMC, accessed April 24, 2026, https://pmc.ncbi.nlm.nih.gov/articles/PMC9785098/
- Navigation in GPS Denied Environments: Feature-Aided Inertial Systems – DTIC, accessed April 24, 2026, https://apps.dtic.mil/sti/pdfs/ADA581023.pdf
- (PDF) Comparison of Three Off-the-Shelf Visual Odometry Systems – ResearchGate, accessed April 24, 2026, https://www.researchgate.net/publication/343110669_Comparison_of_Three_Off-the-Shelf_Visual_Odometry_Systems
- Military Navigation Systems & Positioning Technologies, accessed April 24, 2026, https://www.defenseadvancement.com/suppliers/navigation-positioning/
- Inertial Navigation System (INS) for Drones/UAVs – GreyB, accessed April 24, 2026, https://xray.greyb.com/drones/inertial-navigation-system-uav
- GAO-21-320SP, Defense Navigation Capabilities: DOD is Developing Positioning, Navigation, and Timing Technologies to Complement, accessed April 24, 2026, https://www.gao.gov/assets/gao-21-320sp.pdf
- An Algorithm for Affordable Vision-Based GNSS-Denied Strapdown Celestial Navigation, accessed April 24, 2026, https://www.mdpi.com/2504-446X/8/11/652
- SkyPASS – Polaris Sensor Technologies | Polarimetric & Optical …, accessed April 24, 2026, https://www.polarissensor.com/skypass/
- US6691033B1 – System and method for calibrating inter-star-tracker misalignments in a stellar inertial attitude determination system – Google Patents, accessed April 24, 2026, https://patents.google.com/patent/US6691033B1/en
- Extremely Accurate Star Tracker for Celestial Navigation – AMOS Conference, accessed April 24, 2026, https://amostech.com/TechnicalPapers/2023/Poster/Finney.pdf
- Celestial Navigation for GPS-Denied Missions | Honeywell, accessed April 24, 2026, https://aerospace.honeywell.com/us/en/products-and-services/products/navigation-and-sensors/navigation-systems/celestial-aided-navigation
- A Comprehensive Calibration Method for a Star Tracker and Gyroscope Units Integrated System – MDPI, accessed April 24, 2026, https://www.mdpi.com/1424-8220/18/9/3106
- A Simultaneous Control, Localization, and Mapping System for UAVs in GPS-Denied Environments – MDPI, accessed April 24, 2026, https://www.mdpi.com/2504-446X/9/1/69
- Resilient Tactical UAV Communications in Disconnected Environments – Beechat Network Systems, accessed April 24, 2026, https://beechat.network/2025/05/16/resilient-tactical-uav-communications-in-disconnected-environments/
- Dynamic Cognitive Mesh For Drone Communication – Fly4Future, accessed April 24, 2026, https://fly4future.com/development-and-prototyping/dynamic-cognitive-mesh-for-drone-communication/
- UAS Operation and Navigation in GPS-Denied Environments Using Multilateration of Aviation Transponders – University of Washington, accessed April 24, 2026, https://faculty.washington.edu/lum/publications/GPSDenied2019.pdf
- Pentagon Efforts to Boost Industrial Base Not Moving Needle Yet – Air & Space Forces Magazine, accessed April 24, 2026, https://www.airandspaceforces.com/pentagon-industrial-base-reforms-report/
- What is Blue UAS? The Ultimate Guide to Secure Drone Compliance – Mobilicom, accessed April 24, 2026, https://mobilicom.com/insight/what-is-blue-uas-the-ultimate-guide-to-secure-drone-compliance/
- U.S. Army partnerships bring critical Assured PNT capabilities to American soldiers, accessed April 24, 2026, https://cpeisw.army.mil/2025/05/14/u-s-army-partnerships-bring-critical-assured-pnt-capabilities-to-american-soldiers/
- U.S. Army partnerships bring critical Assured PNT capabilities to American soldiers | Article, accessed April 24, 2026, https://www.army.mil/article/285302/u_s_army_partnerships_bring_critical_assured_pnt_capabilities_to_american_soldiers
- Drone Fleet Maintenance for Government Aerial Surveys & Mapping 2026, accessed April 24, 2026, https://oxmaint.com/industries/government/drone-fleet-maintenance-government-aerial-surveys
- Maintenance of a Drone Fleet – BQR, accessed April 24, 2026, https://www.bqr.com/post/maintenance-of-a-drone-fleet
- How to Maintain Your Enterprise Drone for Maximum Performance, accessed April 24, 2026, https://globaldronehq.com/blogs/news/how-to-maintain-your-enterprise-drone-for-maximum-performance
- High-Fidelity Verification of Vision-Based Sensors for Inertial and Far-Range Spaceborne Navigation – Space Rendezvous Laboratory, accessed April 24, 2026, https://slab.sites.stanford.edu/sites/g/files/sbiybj25201/files/media/file/issfd2017_beierlesullivandamico.pdf
- A Star Sensor On-Orbit Calibration Method Based on Singular Value Decomposition – PMC, accessed April 24, 2026, https://pmc.ncbi.nlm.nih.gov/articles/PMC6696437/
- Prepare Your Drone for Spring: Pre-Season Maintenance and Part 107 Rec, accessed April 24, 2026, https://dronetrust.com/blogs/articles/drone-spring-maintenance
- In Search of the Future for Special Operations Drone Forces – Digital Commons @ USF – University of South Florida, accessed April 24, 2026, https://digitalcommons.usf.edu/cgi/viewcontent.cgi?article=1032&context=gnsi_decision_briefs
- The New Arms Race: Global Drone Dominance and America’s Tactical Wake-Up Call, accessed April 24, 2026, https://smallwarsjournal.com/2025/12/16/the-new-arms-race/
- Special operators seek larger ranges for electronic warfare and drone development and training – Defense One, accessed April 24, 2026, https://www.defenseone.com/technology/2025/12/special-operators-seek-expanded-electronic-drone-warfare-test-sites-us/410248/
- Joint Force Operations in GPS Denied or Degraded Environment – DTIC, accessed April 24, 2026, https://apps.dtic.mil/sti/citations/AD1061997
- Normalizing Unmanned Aircraft Systems Beyond Visual Line of Sight Operations, accessed April 24, 2026, https://www.federalregister.gov/documents/2025/08/07/2025-14992/normalizing-unmanned-aircraft-systems-beyond-visual-line-of-sight-operations
- October 6, 2025 Submitted electronically via Regulations.gov United States Department of Transportation Docket Operations 1200 N – Commercial Drone Alliance, accessed April 24, 2026, https://www.commercialdronealliance.org/file/secure/cda-comments-in-response-to-normalizing-unmanned-aircraft-systems-beyond-visual-line-of-sight-operations-docket-faa-2025-1908.pdf