
1. Executive Summary
The United States Department of Defense (DoD) is in the midst of a foundational paradigm shift regarding the procurement, deployment, and operational integration of unmanned aerial systems (UAS). Driven by strategic initiatives such as Replicator, the DoD aims to field all-domain attritable autonomous systems at an unprecedented scale to offset the quantitative and anti-access/area-denial (A2/AD) advantages of near-peer competitors.1 This initiative represents a recognition that the character of warfare has fundamentally changed; massed, low-cost precision strike capabilities are replacing solitary, exquisite platforms as the primary arbiters of tactical success.3 However, while institutional focus and capital investment are overwhelmingly directed toward the kinematic capabilities and production scale of these airframes, a critical operational vulnerability remains largely unaddressed: the systemic enterprise architecture required to conduct accurate, near-real-time post-strike Battle Damage Assessment (BDA).
When hundreds of autonomous assets engage a target matrix simultaneously, the resulting battlespace becomes highly opaque. The traditional methodology for evaluating strike effectiveness relies heavily on centralized Intelligence, Surveillance, and Reconnaissance (ISR) assets, supported by human-in-the-loop Processing, Exploitation, and Dissemination (PED) workflows.4 These legacy systems, developed for deliberate operations, are entirely unsuited for the speed, volume, and complexity of autonomous swarm engagements. The inability to rapidly verify target destruction, attribute specific kinetic effects to individual platforms amidst heavy electronic warfare, and dynamically update the Common Operating Picture (COP) creates severe situational awareness deficits for commanders operating at echelon.5
This strategic report identifies the doctrinal, technological, and enterprise-level methodology gaps that DoD leadership must address to ensure swarm technologies yield decisive operational advantages. The analysis evaluates the physical challenges of massed detonations, the necessity of multi-modal sensor fusion in degraded environments, the imperative for edge-based neuromorphic processing, and the legal and ethical requirements for establishing accountability in AI-driven targeting.8 Failure to modernize the BDA enterprise concurrently with UAS procurement risks fielding a force capable of mass destruction but incapable of operational assessment, leading to inefficient resource allocation, disrupted mission command, and significant strategic liability. Addressing these methodology gaps is not a secondary sustainment concern; it is a primary warfighting requisite for the future joint force.
2. Strategic Context: The Proliferation of Autonomous Mass
The character of contemporary warfare is undergoing a rapid evolution characterized by the democratization of precision fires. For decades, the United States maintained a near-monopoly on precision strike capabilities, relying on deep magazines of advanced munitions delivered by highly survivable, yet incredibly expensive, platforms.3 The proliferation of cheap drone technology has fundamentally altered this landscape, rendering traditional models of air dominance and force protection increasingly vulnerable.3
2.1 The Replicator Initiative and the Offset Strategy
The DoD’s introduction of the Replicator initiative signifies a concerted effort to allocate resources toward the fielding and deployment of all-domain expendable autonomous capabilities at a scale capable of yielding significant operational impact.11 The core objective of this initiative is to thwart the asymmetric advantages of adversaries—particularly the People’s Liberation Army (PLA) of China—through the application of many, small, “attritable” weapons and combat platforms.2 The PLA is rapidly advancing its drone capabilities by developing more autonomous systems and acquiring them at scale.3 Without deep magazines of autonomous capabilities and the supporting architectures to manage them, the United States risks having its distributed warfighting strategies overwhelmed by massed drone attacks.3
Replicator poses an opportunity for the U.S. Army and the broader Joint Force to continuously transform concepts, capabilities, and capacities.2 However, as the DoD integrates lessons learned from executing the first iterations of the Replicator initiative, leadership must recognize that scale alone is an insufficient countermeasure.11 A pronounced production advantage must be paired with a concerted innovation effort focused on optimizing tactical efficacy.11 Efficacy is directly tied to the ability to assess, adapt, and redirect force—all of which rely entirely on the BDA enterprise.
2.2 Operational Lessons from Contemporary Conflicts
Observations from the Russo-Ukrainian war and conflicts in the Middle East provide a stark preview of the future battlefield. The front lines have expanded into wide “kill zones” where drones detect and strike targets across vast areas with unprecedented precision.13 Ukrainian commanders have leveraged the relatively low cost and high accuracy of these systems to develop new tactical concepts, employing first-person-view (FPV) drones for real-time reconnaissance and loitering munitions for precision strikes against enemy armor, artillery, and command posts.15
The integration of UAS with artillery has been particularly transformative, enabling real-time adjustments of fire and immediate battle damage assessment, thereby changing the entire calculus of fire support.15 However, this operational success is currently predicated on heavy human-in-the-loop involvement. Warfighters manually pilot FPVs, manually assess the video feeds, and manually call for adjustments. As conflicts scale and electronic warfare environments become more hostile, this manual methodology becomes unsustainable. The Ukrainian military’s stated objective is to eventually remove warfighters from direct combat and replace them with autonomous unmanned systems, recognizing that human capacity to process and fuse large amounts of data is a critical vulnerability.16
Furthermore, operations in Syria demonstrate the evolving use of massed systems. During Operation Spring Shield in 2020, Turkish forces grouped armed UAVs together in significant numbers—described as “swarms”—with the specific aim of overwhelming opponent air defenses.17 This approach negated the need to ensure that ground-based air defenses were fully neutralized prior to engagement, as the drones themselves acted as both the sensor and the kinetic effector.17 As these tactics evolve from remote-controlled operations to fully autonomous algorithmic swarms, the necessity for an automated, enterprise-level BDA capability becomes paramount.
3. The Doctrinal Chasm: Legacy BDA Frameworks Versus Swarm Velocity
Current DoD joint targeting doctrine is primarily codified within publications such as Joint Publication 3-60 (JP 3-60). This doctrinal framework was meticulously developed for an era of deliberate, single-platform precision strikes and relies upon methodologies that represent a fundamental mismatch with the operational realities of autonomous drone swarms.18
3.1 The Structural Limitations of Joint Publication 3-60
Targeting encompasses many processes, all linked and logically guided by the joint targeting cycle, which continuously seeks to analyze, identify, develop, validate, assess, and prioritize targets for engagement.19 Combat assessment measures whether desired effects are created, if objectives are achieved, and what next steps are required.4 According to established doctrine, the BDA process is divided into distinct, chronological phases.
Phase I BDA focuses on initial functional damage assessment. This initial reporting is generally expected within a 24-hour window after the information becomes available.4 Phase II assesses specific target element damage. Phase III, known as Target System Assessment, evaluates the broader impact on an adversary’s overall capabilities. Doctrine explicitly describes Phase III as a “data-intensive process” that “typically requires weeks to months to accumulate the data to assess the impact on the target system”.4
In the context of a massed drone strike, where hundreds of loitering munitions or small FPV drones may engage an enemy defensive line within a span of minutes, a 24-hour feedback loop is tactically obsolete. Autonomous swarm logic relies on instantaneous, continuous feedback to effectively reallocate surviving airborne assets to undestroyed targets.20 If a swarm must hold position or return to base to wait for external ISR platforms to conduct a Phase I assessment, the principles of mass, momentum, and operational tempo are entirely forfeited.
Furthermore, JP 3-60 explicitly acknowledges a critical methodology gap: the limited availability of collection assets. The doctrine states that Intelligence, Surveillance, and Reconnaissance (ISR) and Processing, Exploitation, and Dissemination (PED) assets are “usually limited in number”.4 In operational reality, collection requirements for target development, Joint Intelligence Preparation of the Operational Environment (JIPOE), and indications and warnings frequently take precedence over combat assessment.4 Relying on these scarce, highly centralized assets to monitor and evaluate hundreds of simultaneous drone strikes is mathematically and operationally untenable.
| Doctrinal BDA Phase | Traditional Methodology (JP 3-60) | Swarm Operations Requirement | Discrepancy Impact |
| Phase I (Initial) | Visual confirmation via external ISR within 24 hours. | On-board assessment within milliseconds of adjacent detonations. | Swarm cannot dynamically re-task surviving effectors, resulting in wasted munitions or surviving enemy targets. |
| Phase II (Element) | Human PED analysis of sensor data to determine functional degrade. | Edge-AI processing utilizing semantic compression and local models. | Human analysts are overwhelmed by the volume of raw video feeds from hundreds of platforms. |
| Phase III (System) | Weeks to months of data aggregation to assess overall system collapse. | Real-time automated COP updates via API integration. | Operational commanders lack accurate situational awareness to commit exploitation forces. |
3.2 The Operational Risk of Estimated Damage Assessment (EDA)
In scenarios where physical confirmation of damage is unavailable—a highly probable situation in heavily contested, A2/AD airspace where dedicated BDA ISR assets cannot survive—doctrine permits the use of Estimated Damage Assessment (EDA).4 The EDA methodology anticipates damage by utilizing probabilistic models based on the known effectiveness of specific weapons against specific target types. This allows a commander to accept operational risk in the absence of definitive visual data.4
Relying on EDA methodologies for massed drone strikes introduces profound strategic and tactical risk. Unmanned systems, particularly the lower-cost “attritable” models envisioned by the Replicator initiative, possess highly variable failure rates, payload yields, and navigation vulnerabilities compared to traditional munitions.21 If a swarm of 500 autonomous drones is launched against a mechanized brigade, and the EDA methodology assumes an 85% success rate based on pre-flight probabilities, operational commanders may erroneously advance friendly maneuver forces into fully intact enemy defensive networks. Alternatively, if commanders lack confidence in the EDA due to known high attrition rates of small UAS, they may authorize continuous re-attacks on already destroyed targets, rapidly depleting the finite magazine depth of the swarm and stressing logistical supply chains.20
3.3 Munitions Effectiveness Assessment (MEA) Latency
Another significant doctrinal gap exists within the Munitions Effectiveness Assessment (MEA) framework. MEA evaluates whether a weapon functioned as engineered and intended.4 Currently, MEA data generation relies on a long-term feedback loop. The intelligence gathered is typically funneled into the Joint Munitions Effectiveness Manual (JMEM) revision process to inform future capability analysis, rather than providing an immediate tactical adjustment for ongoing engagements.4
For drone swarms to function as intelligent, adaptive combat systems, MEA must transition from a retrospective analytical tool to a near-real-time tactical capability. If an adversary introduces a novel electronic warfare (EW) jamming technique, a new directed energy weapon, or a physical countermeasure that causes a specific munition to fail in the terminal phase, the swarm must immediately recognize this failure.23 It must then rapidly shift tactics, alter approach trajectories, or switch sensor modalities. A delayed MEA feedback loop renders the entire massed swarm highly susceptible to a single, rapidly deployed countermeasure, potentially neutralizing the entire force package before human analysts even register the failure.22
4. The Physical and Environmental Realities of Massed Strikes
The visual and electromagnetic environment resulting from a massed drone strike creates immense physical barriers to accurate post-strike assessment. The sheer density of kinetic events generates systemic interference that routinely blinds traditional optical sensor arrays, necessitating a complete overhaul of how autonomous systems perceive the post-strike battlespace.
4.1 Visual Occlusion, Thermal Blooming, and Electromagnetic Chaos
When kinetic energy weapons, such as the shaped charges or fragmentation payloads carried by loitering munitions, impact their targets, they deposit massive amounts of kinetic and thermal energy, generating highly localized destruction.24 In a coordinated mass strike involving dozens or hundreds of detonations within a tightly confined geographical area, the resulting physical phenomena actively obscure the battlefield from observation.
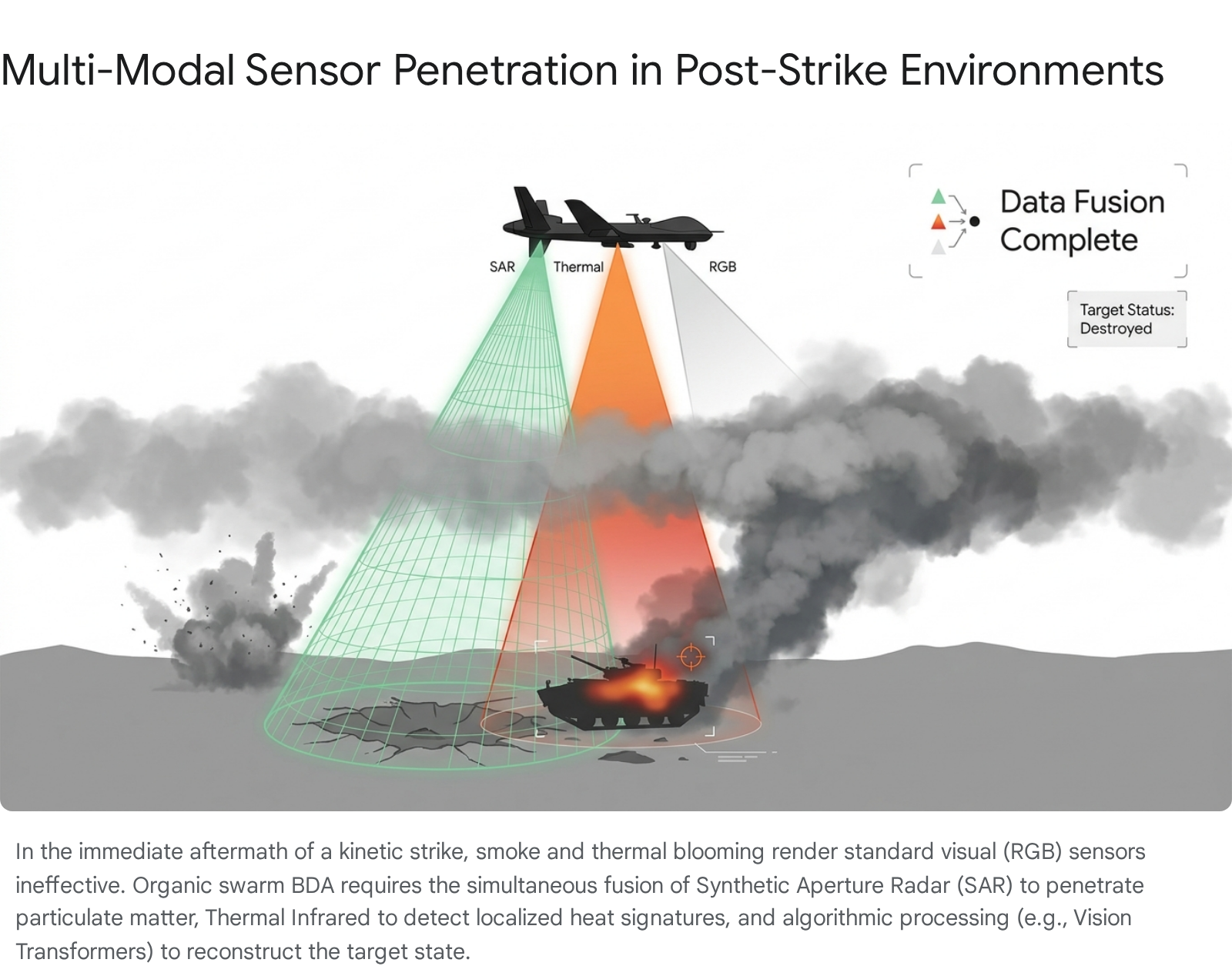
The primary impediment is particulate obscuration. Pulverized concrete, displaced earth, fragmented armor, and combustion smoke create a dense, persistent aerosol layer over the target area. Traditional visual (RGB) cameras, which are heavily relied upon for FPV targeting and basic intelligence gathering, cannot penetrate this layer.10
Simultaneously, the heat generated by consecutive explosions saturates infrared (IR) sensors, a phenomenon known as thermal blooming. An incoming follow-on drone attempting to assess the damage of a preceding strike wave will find its thermal optics blinded by the residual heat signature of the destroyed target, the burning terrain, and the atmospheric distortion.10 This makes it nearly impossible for basic algorithms to differentiate between a burning, destroyed vehicle and the still-intact armor positioned adjacent to it.
Furthermore, these massed detonations, coupled with active adversary electronic warfare and the necessary friendly jamming meant to protect the swarm from counter-UAS systems, create a highly contested and chaotic electromagnetic spectrum (EMS).21 The denial of the EMS affects friendly units just as severely as adversaries.21 If a swarm is programmed to strike in rapid succession, the drones arriving at the target area moments after the initial wave are flying into an environment that is visually, thermally, and electromagnetically opaque. Without specialized, multi-modal methodologies to see through this post-strike fog, follow-on drones cannot conduct BDA, nor can they accurately acquire secondary targets.
4.2 The Imperative of Multi-Modal Sensor Fusion
To overcome these severe physical limitations, the enterprise BDA methodology must definitively shift from single-sensor reliance to automated, multi-modal sensor fusion driven by advanced neural networks.10
Recent research in remote sensing and disaster monitoring demonstrates that relying solely on Electro-Optical (EO) or IR sensors is entirely insufficient for highly obscured environments.10 Advanced methodologies necessitate the integration of Synthetic Aperture Radar (SAR) with high-resolution UAV-based optical and thermal imagery.10 SAR possesses the unique physical capability to penetrate dense smoke, heavy cloud cover, and airborne obscurants, providing high-fidelity topological mapping and structural analysis of the target area regardless of visual conditions.10
Implementing this level of multi-modal fusion across a swarm requires highly sophisticated neural network architectures capable of operating on constrained hardware. For example, hybrid learning frameworks utilizing Vision Transformers (such as FPANet) can capture both local textures and global spatial dependencies to achieve robust segmentation from SAR data under cloudy or smoky conditions.10 Simultaneously, models designed specifically for the synergistic fusion of thermal and RGB imagery (such as DualSegFormer) ensure high-fidelity target delineation even when visibility is partially compromised.10 Other optimization algorithms, such as customized versions of YOLOv8 utilizing High Intersection over Union (HIoU) loss functions, dynamically adjust the weight of various visual components to achieve precise target localization despite background noise.27
The core enterprise challenge for the DoD is not merely acquiring these diverse sensors, but engineering the algorithms that allow attritable, low-cost drones to fuse this disparate data organically and autonomously.
5. Enterprise Architecture and Telemetry Bottlenecks
The defining characteristic of a functional drone swarm is its interconnectedness—the ability of multiple independent agents to share data and act cooperatively.20 However, this critical connectivity creates a massive structural vulnerability when applied to traditional BDA methodologies, which rely on moving large packets of raw data back to human analysts.
5.1 The Bandwidth Paradox and Electromagnetic Contestation
A swarm comprising hundreds of drones, each equipped with visual, thermal, SAR, and telemetry sensors, generates an astronomical volume of data continuously.9 In a peacetime, uncontested environment—such as a disaster response scenario or a domestic training exercise—streaming high-definition multi-modal data from multiple platforms to a centralized Ground Control Station (GCS) is feasible via 5G networks and unhindered line-of-sight communications.29 In a large-scale combat operation (LSCO) against a near-peer adversary, this data architecture will immediately collapse.
Adversaries will employ aggressive electronic warfare (EW), attempting to jam the radio-frequency links required for both command and control (C2) and data transmission.23 Furthermore, wide-area and wide-spectrum jamming operations inherently affect both friendly and enemy units. To operate effectively, friendly forces must meticulously map, interpret, and deconflict their own EMS usage to avoid electronic fratricide.21 Consequently, the available bandwidth for a swarm operating over a contested target area will be severely constrained, highly intermittent, or entirely denied for extended periods.
5.2 Edge Computing and Semantic Compression Methodologies
To successfully execute BDA under these highly contested conditions, the fundamental methodology of data processing must be inverted. Instead of transmitting raw, high-bandwidth data (such as live video feeds or raw radar returns) back to human analysts for processing, the data must be analyzed autonomously on the drone itself, and only the resulting assessment transmitted. This architectural shift relies on edge computing and semantic compression.31
Onboard edge processing capabilities drastically reduce latency by analyzing data locally rather than transmitting it to remote servers.31 From a practical standpoint, instead of attempting to transmit a gigabyte of video showing a burning enemy surface-to-air missile system, the drone’s onboard AI processes the video, confirms the destruction of the target against its pre-loaded threat library, and transmits a kilobyte-sized text telemetry packet: “.
This methodological shift is critical for the viability of massed autonomous operations. It transforms the swarm from a collection of “dumb” aerial cameras requiring massive, vulnerable data pipelines into a decentralized network of distributed intelligence nodes requiring minimal bandwidth to rapidly update the COP.
5.3 Neuromorphic Computing for Advanced RF Analysis
Achieving this level of sophisticated edge computing on small, attritable platforms presents a significant hardware challenge. Traditional processors consume substantial power and generate heat, which directly reduces the flight time, range, and payload capacity of small UAS.6 To bridge this gap, the DoD is currently funding research into advanced methodologies, particularly the application of artificial intelligence based on neuromorphic networks.9
Neuromorphic computing seeks to replicate human brain functionality at the nanoscale using man-made artificial neurons and synapses.9 This architecture allows for highly parallelized computing, with vast amounts of memory located in immediate proximity to the computing elements. The result is substantially increased processing speed coupled with drastically reduced power consumption.9 For military applications, a critical advantage of neuromorphic networks is their ability to operate in GHz and even THz frequency ranges.9 This high-frequency property allows the neural network to process microwave and RF signals directly at the carrier frequency without the power-intensive need for prior digitization or super-heterodyning.9
A swarm equipped with low-power neuromorphic processors could instantly analyze the complex RF signatures of a contested environment, detect the emissions of an enemy radar system, assess the functional damage of that electronic target post-strike by noting the cessation or alteration of its signal, and share that assessment across the swarm instantly, all while operating under stringent power and bandwidth limitations.
6. Methodological Paradigms for Attributing Kinetic Effects
In a legacy dispersed targeting scenario utilizing single platforms, attributing a kinetic effect is highly straightforward: one weapon is deployed against one target, and the resultant outcome is assessed directly.21 However, in a mass precision strike, where salvos of hundreds of effectors are launched to overwhelm point defenses at key sites, attributing kinetic effects becomes a mathematically and tactically complex “many-to-many” problem.21
6.1 The Challenge of Distinguishing Intercepts from Impacts
When an autonomous swarm of 200 drones assaults a heavily defended position, the adversary’s air defense artillery (ADA), electronic warfare elements, directed energy weapons, and kinetic counter-UAS systems will engage the swarm simultaneously.3 If 60 drones detonate mid-air due to kinetic intercepts, 40 crash indiscriminately due to intense EW jamming, and 100 successfully strike their designated targets, the resulting battlespace telemetry is highly ambiguous.
A critical BDA methodology gap is the enterprise’s ability to distinguish a mid-air intercept from a successful target impact based solely on the loss of platform telemetry. Currently, if an attritable drone loses connection or its telemetry suddenly ceases, the overarching system cannot definitively determine if the asset reached its objective, was neutralized en route by kinetic fire, or succumbed to electronic interference.34 This lack of granular data leads to profound inaccuracies in determining enemy attrition rates and forces commanders to make decisions based on highly flawed data sets.
6.2 The “Observer-Striker” Topology and Trailing Observers
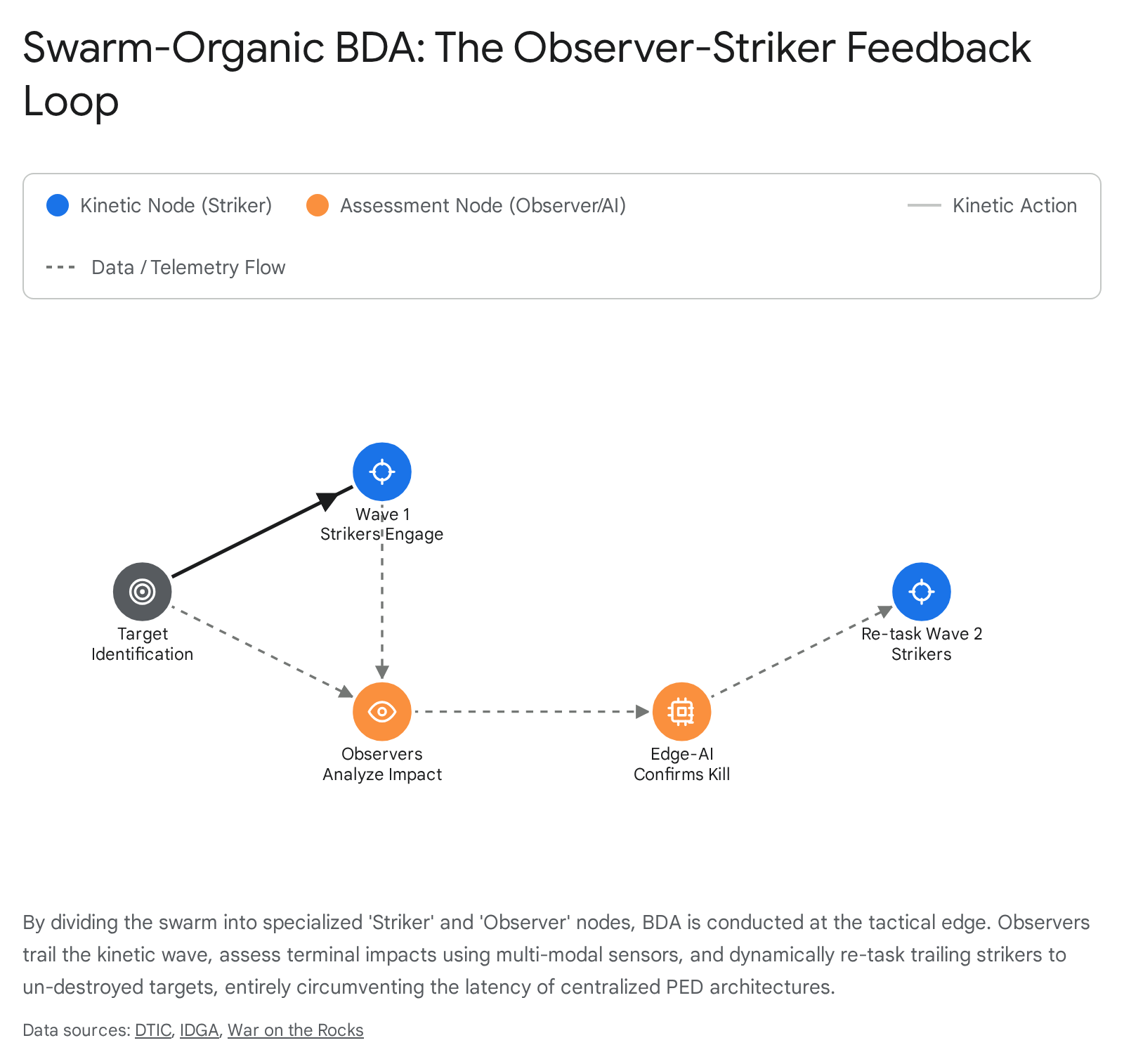
To resolve these severe attribution gaps without relying on vulnerable centralized ISR assets, the swarm itself must adopt specialized, internal structural topologies. Rather than engineering every drone in the swarm to act solely as a kinetic effector, the swarm must autonomously designate specific platforms as trailing observers or organic BDA nodes.35
This methodology involves explicitly pairing loitering munitions with dedicated surveillance drones within the swarm’s algorithmic structure.36 By trailing an observer drone slightly behind a kinetic wave, the observer can continuously record the terminal trajectory of the munitions. Telemetry sensors on a striking munition can transmit its GPS coordinates and flight data up to the exact millisecond before detonation.35 The trailing observer then analyzes the characteristics of the medium the munition passed through—for example, assessing whether a weapon successfully penetrated a reinforced bunker roof before detonating, or if it detonated harmlessly on the exterior.35
This “observer-striker” methodology allows the swarm to establish a continuous, localized, and autonomous feedback loop. The observer assesses the initial kinetic wave, utilizes its multi-modal sensors to confirm exactly which targets were successfully destroyed, and instantly assigns remaining, un-engaged targets to the second wave of strikers. This creates a highly efficient one-to-one engagement ratio that conserves the swarm’s overall ammunition depth and minimizes unintended collateral damage, operating almost entirely independently of human oversight.20
7. Updating Intelligence, Mission Command, and Situational Awareness
The ultimate operational purpose of Battle Damage Assessment is not merely to compile a post-action inventory of destroyed enemy equipment. The primary objective is to continuously update the commander’s understanding of the operational environment, enabling rapid, informed decision-making and facilitating the deployment of exploitation forces.7
7.1 The Disconnect in the Common Operating Picture (COP)
Mission Command is a foundational doctrine based on a hybrid of centralized control and decentralized execution.32 However, there is a recognized trade-off between the proximity of forces to tactical engagements and their access to different kinds of operational information.32 As distance from the forward edge of the battlefield increases, situational awareness regarding specific tactical engagements inherently decreases.32 Put simply, the farther a commander is from the front lines, the less granular their understanding of the immediate ground truth.
Commanders located in centralized Joint Operations Centers rely entirely on the COP to understand the disposition of forces. However, if a drone swarm acts autonomously and alters its targeting priorities based on its own edge-processed BDA, the COP immediately becomes desynchronized from reality. For instance, if a swarm of 300 drones is deployed against a confirmed enemy artillery battery, and the swarm’s organic intelligence nodes determine upon arrival that the battery is actually an elaborate decoy setup, the swarm may autonomously re-route to a pre-planned secondary target.37 If this decision logic and the subsequent BDA findings are not efficiently and automatically communicated back to the enterprise level, the Joint Force Commander will continue to operate under the dangerously false assumption that the primary target was engaged and neutralized.
7.2 Vision-Language Models (VLM) for Automated Reporting
To bridge this critical intelligence gap without overwhelming the constrained bandwidth of the contested EMS, the DoD must invest heavily in integrating Vision-Language Models (VLM) into the drone enterprise architecture.10 VLMs possess the advanced algorithmic capability to ingest complex, multi-modal sensor data—such as fused SAR, thermal, and RGB imagery—and translate those visual inputs into actionable, human-readable intelligence insights.10
Instead of a human intelligence analyst reviewing hours of degraded drone footage to manually compile a Phase I BDA report, a VLM operating either at the tactical edge or at a localized forward relay node can instantly generate a formatted text report for transmission. Experimental results demonstrate that VLM components show strong semantic alignment, producing highly accurate translations of complex sensor data.10 A system could autonomously transmit a concise packet: “Assault on Grid Alpha complete. 12 of 15 air defense assets neutralized. 3 assets remain active. Swarm expended 80% of kinetic payload. Recommend follow-on artillery strike.”
This methodology ensures that high-level commanders maintain acute operational awareness and can effectively exercise Mission Command without the need to micromanage the swarm’s individual tactical engagements.32
7.3 Data Formats, API Integration, and MLOps
Processing massed drone strike data requires a robust, scalable enterprise architecture that extends far beyond the physical airframe. The current methodology of retrieving data manually from returning platforms or relying on “swivel-chair” integration by analysts manually inputting data into the COP is unworkable at scale.30
The enterprise architecture must incorporate:
- Modular Data Platforms: Systems capable of receiving diverse telemetry and sensor data from various drone manufacturers, formatting it, filtering it for relevance, and converting it for immediate ingestion into joint intelligence systems.30
- API Integration: The GCS must seamlessly interface with broader military intelligence databases via Application Programming Interfaces (APIs), pushing BDA updates automatically so that all adjacent units and echelons are instantly aware of target status changes.38
- Machine Learning Operations (MLOps): Edge AI models will inevitably encounter novel adversary countermeasures, new camouflage techniques, or unexpected environmental variables. The enterprise requires a continuous, automated MLOps pipeline to ingest post-mission data, retrain the computer vision and BDA models, and push updated algorithmic weights back to the swarm fleet before the next operational deployment.33
| Enterprise Capability Pillar | Current State (Legacy Methodology) | Required State for Massed Autonomous UAS |
| Data Ingestion | Manual download from returning platforms; slow transmission of raw video. | Real-time modular formatting, filtering, and semantic compression over secure RF links. |
| COP Integration | Manual data entry by intelligence analysts. | Automated API push via Vision-Language Models directly to command nodes. |
| Algorithm Updating | Months-long software acquisition and testing cycles. | Continuous MLOps pipeline for rapid model retraining and fleet-wide deployment. |
| Hardware Management | Depot-level maintenance and slow logistical tail. | Scalable kitting services, hot-swaps, and automated fleet diagnostics.39 |
8. Legal, Ethical, and Accountability Frameworks for Autonomous BDA
As BDA methodologies inevitably shift from human-in-the-loop PED architectures to edge-AI autonomous assessments, the DoD faces significant legal, ethical, and oversight challenges. Existing international law, particularly concerning the conduct of war, is heavily predicated on human accountability and conscious decision-making.8
8.1 Proportionality and the Assessment of Collateral Damage
Under the established Law of Armed Conflict (LOAC), military operations must strictly adhere to the rule of proportionality. This principle dictates that the incidental loss of civilian life, injury to civilians, or damage to civilian objects must not be excessive in relation to the anticipated concrete and direct military advantage of an attack.40 Assessing proportionality requires a deeply contextual understanding of the operational environment—a nuanced cognitive capability that current AI systems struggle to reliably frame.40
In a massed drone strike, if an autonomous system initiates an attack, it must inherently possess the capability to assess collateral damage post-strike to determine if further engagement violates LOAC. The deployment of autonomous explosive devices, such as the Shahed-136 loitering munitions used extensively against energy infrastructure in the Russo-Ukrainian war, highlights these dangers.8 These systems, classified as Lethal Autonomous Weapon Systems (LAWS), engage pre-selected target groups independently.8
If a U.S. swarm strikes a legitimate military target but causes unintended, cascading failures in adjacent civilian infrastructure, who is accountable? The inability of an autonomous system to “frame” and contextualize the broader environment may result in the system deciding to launch follow-on attacks based not merely on incomplete, but fundamentally flawed understandings of the circumstances.40 If the swarm lacks robust, multi-modal BDA capabilities to realize it has caused excessive collateral damage, it lacks the necessary failsafes to halt its own operations.
8.2 The “Black Box” Problem and Systemic Traceability
The deployment of LAWS raises profound questions regarding how individuals or state actors answer for crimes or errors committed on a mass scale by autonomous entities.8 If a swarm executes a coordinated strike utilizing its own edge-assessed BDA to determine target validity and authorize kinetic deployment, the human operator is effectively removed from the kill chain.41
Without meticulous enterprise requirements to log the decision-making process of every single drone—often referred to as the “black box” problem for autonomous systems—attributing a kinetic effect to a specific algorithm or decision node becomes impossible. Process evidence must be derived from how data is prepared, managed, analyzed, and delivered throughout the flight lifecycle.33
If an unlawful strike occurs, or a friendly fire incident takes place, investigators must be able to pull the BDA telemetry, the sensor logs, and the specific AI decision tree to determine the root cause. Was the error due to hardware sensor failure, algorithmic bias in the targeting model, or sophisticated adversary spoofing and deception? The current institutional rush to field vast quantities of attritable drones often overlooks the massive data storage, logging architectures, and forensic methodologies required to maintain this legal compliance and operational accountability.33
9. Strategic Recommendations and Institutional Reform
The Department of Defense’s pursuit of drone dominance, catalyzed by the rapid innovations and harsh lessons observed in theaters like Ukraine and the Middle East 14, is a strategically necessary evolution. However, deploying mass without the institutional capacity to assess its impact is strategically hollow and operationally reckless. To ensure commanders possess accurate situational awareness, maintain compliance with international law, and retain the ability to dictate the tempo of modern conflict, DoD leadership must aggressively address the following methodological gaps.
9.1 Shift Investment Priorities from Platforms to Architectures
The acquisition focus must widen significantly from the procurement of individual, attritable drone platforms to the procurement of the underlying software, data pipelines, and sensing architectures. A swarm of 10,000 highly advanced drones is entirely neutralized if the enterprise cannot process their telemetry or conduct BDA in a severely jammed environment. Investment should heavily prioritize the development of ultra-fast neural networks, neuromorphic computing, and multi-modal sensor fusion algorithms (specifically integrating SAR, EO, and IR) that operate reliably at the tactical edge.9 The software that assesses the strike is as vital as the hardware that delivers it.
9.2 Establish Composite Formations to Reduce Sensor-to-Shooter Latency
Operational latency expands unacceptably when detection systems, kinetic shooters, EW cells, and BDA analysts operate in separate, stovepiped organizational stacks.22 The DoD must develop composite formations that co-locate and institutionalize the integration of these complementary capabilities at the brigade and battalion levels.22 Drone defense and employment cannot be siloed exclusively to dedicated air defense or aviation units; every unit must possess organic, integrated capabilities to launch, assess, and iterate upon unmanned strikes.3
9.3 Codify Autonomous BDA Methodologies in Doctrine
Joint Publication 3-60 and supporting multi-service tactics, techniques, and procedures must be comprehensively revised to reflect the realities of the modern, automated battlefield.18 Doctrine must move beyond the centralized, human-dependent Phase I-III BDA processes and formally establish frameworks for automated, probabilistic edge assessment. Furthermore, doctrine must establish clear, standardized guidelines for when a commander is authorized to rely on AI-generated BDA to approve follow-on fires, explicitly addressing the inherent risks of algorithmic deception and false positives.
9.4 Mandate Systemic Traceability and Forensic Logging
To resolve the ethical and legal ambiguities surrounding massed autonomous strikes, the DoD must implement strict, non-negotiable enterprise requirements for data logging. Every drone within a deployed swarm must act as a distinct node that continuously records its sensor inputs, target selections, and BDA conclusions.33 This methodology ensures that kinetic effects can be accurately attributed, AI behaviors can be audited post-mission, and compliance with the Law of Armed Conflict can be rigidly maintained, even when the human operator is no longer present in the immediate tactical loop.
By aggressively addressing these systemic requirements to design, build, operate, and evolve the BDA enterprise, the Department of Defense can successfully transform massed drone swarms from a blunt instrument of attrition into a highly precise, intelligent, and strategically decisive capability for the future Joint Force.
Please share the link on Facebook, Forums, with colleagues, etc. Your support is much appreciated and if you have any feedback, please email us in**@*********ps.com. If you’d like to request a report or order a reprint, please click here for the corresponding page to open in new tab.
Sources Used
- Implementing DoD Replicator Initiative at Speed and Scale – Defense Innovation Unit, accessed April 24, 2026, https://www.diu.mil/latest/implementing-the-department-of-defense-replicator-initiative-to-accelerate
- The Replicator initiative is key to the Army’s modernization | Brookings, accessed April 24, 2026, https://www.brookings.edu/articles/the-replicator-initiative-is-key-to-the-armys-modernization/
- Countering the Swarm – CNAS, accessed April 24, 2026, https://www.cnas.org/publications/reports/countering-the-swarm
- Air Force Doctrine Publication 3-60, Targeting, accessed April 24, 2026, https://www.doctrine.af.mil/Portals/61/documents/AFDP_3-60/3-60-AFDP-TARGETING.pdf
- Countering Swarms: Strategic Considerations and Opportunities in …, accessed April 24, 2026, https://ndupress.ndu.edu/Joint-Force-Quarterly/Joint-Force-Quarterly-107/Article/Article/3197193/countering-swarms-strategic-considerations-and-opportunities-in-drone-warfare/
- Unmanned Aerial Systems Intelligent Swarm Technology – RAND, accessed April 24, 2026, https://www.rand.org/content/dam/rand/pubs/research_reports/RRA2300/RRA2380-1/RAND_RRA2380-1.pdf
- Beyond The Count: BDA For Modern Warfare – from MIPB, accessed April 24, 2026, https://mipb.ikn.army.mil/issues/jul-dec-2025/beyond-the-count/
- Lethal Autonomous Weapon Systems (LAWS): Accountability, Collateral Damage, and the Inadequacies of International Law – Temple iLIT, accessed April 24, 2026, https://law.temple.edu/ilit/lethal-autonomous-weapon-systems-laws-accountability-collateral-damage-and-the-inadequacies-of-international-law/
- Drone Swarm Detection Using Artificial Intelligence Based on Ultrafast Neural Networks, accessed April 24, 2026, https://armysbir.army.mil/topics/drone-swarm-detection-ai-based-ultrafast-neural-networks/
- Hybrid learning framework for synergistic fusion of SAR and optical UAV data in wildfire surveillance – PMC, accessed April 24, 2026, https://pmc.ncbi.nlm.nih.gov/articles/PMC12669746/
- Defining Swarm: A Critical Step Toward Harnessing the Power of Autonomous Systems, accessed April 24, 2026, https://www.armyupress.army.mil/journals/military-review/online-exclusive/2025-ole/defining-swarm/
- DOD Innovation Official Discusses Progress on Replicator – Department of War, accessed April 24, 2026, https://www.war.gov/News/News-Stories/Article/Article/3999474/dod-innovation-official-discusses-progress-on-replicator/
- Drone Swarms: The Potential AI Future of Drone Warfare – Small Wars Journal, accessed April 24, 2026, https://smallwarsjournal.com/2026/03/31/drone-warfare-ukraine-ai-swarms/
- The Enduring Role of Fires on the Modern Battlefield – CSIS, accessed April 24, 2026, https://www.csis.org/analysis/chapter-6-enduring-role-fires
- Unmanned Aircraft and the Revolution in Operational Warfare – Army University Press, accessed April 24, 2026, https://www.armyupress.army.mil/Journals/Military-Review/English-Edition-Archives/July-August-2025/Unmanned-Aircraft-Revolution/
- Ukraine’s Future Vision and Current Capabilities for Waging AI-Enabled Autonomous Warfare – CSIS, accessed April 24, 2026, https://www.csis.org/analysis/ukraines-future-vision-and-current-capabilities-waging-ai-enabled-autonomous-warfare
- Armed uninhabited aerial vehicles and the challenges of autonomy – The International Institute for Strategic Studies, accessed April 24, 2026, https://www.iiss.org/globalassets/media-library—content–migration/files/research-papers/armed-uninhabited-aerial-vehicles-and-the-challenges-of-autonomy.pdf
- JP 3-60, Joint Targeting – Just Security, accessed April 24, 2026, https://www.justsecurity.org/wp-content/uploads/2015/06/Joint_Chiefs-Joint_Targeting_20130131.pdf
- Joint Publication 3-60 – Executive Services Directorate, accessed April 24, 2026, https://www.esd.whs.mil/Portals/54/Documents/FOID/Reading%20Room/Joint_Staff/21-F-0520_JP_3-60_9-28-2018.pdf
- Drones Aren’t Swarming Yet — But They Could – War on the Rocks, accessed April 24, 2026, https://warontherocks.com/drones-arent-swarming-yet-but-they-could/
- Mass Precision Strike: Designing UAV Complexes for Land Forces – RUSI, accessed April 24, 2026, https://static.rusi.org/mass-precision-strike-final.pdf
- Composite Air Defense Artillery Formations: Converging Non-Kinetic and Kinetic Capabilities – Line of Departure, accessed April 24, 2026, https://www.lineofdeparture.army.mil/Journals/Air-Defense-Artillery/ADA-Archive/2026-E-Edition/Composite-Air-Defense/
- Breaking the Shield: Countering Drone Defenses – NDU Press, accessed April 24, 2026, https://ndupress.ndu.edu/Media/News/News-Article-View/Article/3838997/breaking-the-shield-countering-drone-defenses/
- DE Weapons, Projectiles, Damage – DRONE DELIVERY OF CBNRECy – New Prairie Press Open Book Publishing, accessed April 24, 2026, https://kstatelibraries.pressbooks.pub/drone-delivery/chapter/9-kinetic-energy-weapons/
- Eyes across the spectrum: Advancing India’s EO/IR Capabilities, accessed April 24, 2026, https://www.ey.com/content/dam/ey-unified-site/ey-com/en-in/insights/aerospace-defense/2025/ey-eyes-across-the-spectrum-advancing-india-s-eo-ir-capabilities.pdf
- Drone-Based Wildfire Detection with Multi-Sensor Integration – MDPI, accessed April 24, 2026, https://www.mdpi.com/2072-4292/16/24/4651
- Intelligent Firefighting Technology for Drone Swarms with Multi-Sensor Integrated Path Planning: YOLOv8 Algorithm-Driven Fire Source Identification and Precision Deployment Strategy – MDPI, accessed April 24, 2026, https://www.mdpi.com/2504-446X/9/5/348
- Monitoring and Cordoning Wildfires with an Autonomous Swarm of Unmanned Aerial Vehicles – MDPI, accessed April 24, 2026, https://www.mdpi.com/2504-446X/6/10/301
- An inside look at drone swarm behavior – McKelvey School of Engineering – WashU, accessed April 24, 2026, https://engineering.washu.edu/news/2026/An-inside-look-at-drone-swarm-behavior.html
- Data Processing for Drones & Unmanned Systems, accessed April 24, 2026, https://www.unmannedsystemstechnology.com/expo/drone-data-processing/
- Real-Time Disaster Response with AI Drone Swarms – Folio3 AI, accessed April 24, 2026, https://www.folio3.ai/blog/ai-drone-swarms-disaster-response
- How Artificial Intelligence Could Reshape Four Essential Competitions in Future Warfare – RAND, accessed April 24, 2026, https://www.rand.org/content/dam/rand/pubs/research_reports/RRA4300/RRA4316-1/RAND_RRA4316-1.pdf
- A Comprehensive Approach to Countering Unmanned Aircraft Systems – Joint Air Power Competence Centre, accessed April 24, 2026, https://www.japcc.org/wp-content/uploads/A-Comprehensive-Approach-to-Countering-Unmanned-Aircraft-Systems.pdf
- Fusing Data into a Battle Damage Assessment for the Commander – U.S. Army, accessed April 24, 2026, https://api.army.mil/e2/c/downloads/2023/01/31/cb115ad9/22-732.pdf
- Capabilities and Limitations of Real-Time Battle Damage Assessment – DTIC, accessed April 24, 2026, https://apps.dtic.mil/sti/pdfs/ADA420587.pdf
- Loitering Munitions 101: What They Are and Why They Matter – IDGA, accessed April 24, 2026, https://www.idga.org/command-and-control/articles/loitering-munitions-101-what-they-are-why-they-matter
- How AI is rewriting the rules of modern warfare – Vision of Humanity, accessed April 24, 2026, https://www.visionofhumanity.org/how-ai-is-rewriting-the-rules-of-modern-warfare/
- UAV swarm communication and control architectures: a review, accessed April 24, 2026, https://cdnsciencepub.com/doi/10.1139/juvs-2018-0009
- Scaling an Enterprise Drone Program for Future Success, accessed April 24, 2026, https://enterprise.dronenerds.com/blog/uncategorized/scaling-an-enterprise-drone-program-for-future-success/
- Libya, The Use of Lethal Autonomous Weapon Systems – How does law protect in war?, accessed April 24, 2026, https://casebook.icrc.org/case-study/libya-use-lethal-autonomous-weapon-systems
- Effects of AI-Enhanced Decision-Making on Air Force Doctrine – Air University, accessed April 24, 2026, https://www.airuniversity.af.edu/Wild-Blue-Yonder/Articles/Article-Display/Article/3828212/effects-of-ai-enhanced-decision-making-on-air-force-doctrine/