
1. Executive Summary
The modernization of ground combat forces through tactical autonomy represents one of the most complex engineering mandates currently pursued by the United States Department of Defense. In August 2025, the U.S. Army awarded Other Transaction Authority (OTA) agreements totaling approximately $15.5 million to three commercial autonomy developers—Forterra, Overland AI, and Scout AI.1 Originally structured to integrate proprietary commercial off-the-shelf (COTS) self-driving stacks onto the Infantry Squad Vehicle (ISV) platform, the Unmanned Systems (UxS) Autonomy program underwent a strategic and structural recalibration. Acknowledging the mechanical and safety limitations of the ISV as a surrogate for uncrewed operations, the Army initially altered the program parameters to allow the awarded vendors to deploy their software on preferred surrogate robotic platforms.3 However, as of April 2026, the UxS program has been officially paused, placing the upcoming prototype evaluations originally scheduled for May 2026 into a holding pattern.3
This highly technical analysis examines the rigorous engineering demands of the UxS program.5 Off-road military autonomy introduces operational complexities that are entirely absent from commercial on-road Operational Design Domains (ODDs). Specifically, this report analyzes the unique sensor fusion architectures required for unstructured environments, emphasizing the integration of 4D Frequency Modulated Continuous Wave (FMCW) LiDAR, passive optical sensors, and Localizing Ground Penetrating Radar (LGPR) for resilient navigation in GPS-denied and contested electromagnetic spectrums.7
Furthermore, the analysis investigates the algorithmic breakthroughs necessary for obstacle classification in heavy foliage and soft, deformable terrain such as mud. It focuses on the deployment of self-supervised costmap learning, Vision-Language-Action (VLA) foundation models, and real-time terramechanics.10 These intense computational workloads must be processed instantaneously on the tactical edge, constrained by strict Size, Weight, Power, and Cooling (SWaP-C) limitations in MIL-STD-810H environments.13 Finally, the report contrasts these extreme military requirements with commercial autonomous driving standards, illustrating why civilian functional safety frameworks, such as SAE J3016 and ISO 26262, are inherently insufficient for defining, testing, and validating combat-ready ground autonomy.15 Whether executed in May 2026 or at a later date, the successful deployment of these systems will require a fundamental departure from commercial paradigms, demanding platforms that prioritize mission execution and attritability over zero-risk navigation.
2. Evolution of the U.S. Army Unmanned Systems (UxS) Autonomy Program
The U.S. Army has historically encountered significant engineering and programmatic friction when attempting to field fully autonomous ground vehicles. This difficulty arises primarily from the extreme unpredictability of the modern battlefield—an environment devoid of lane markings, traffic signals, predictable obstacle behavior, and stable communications infrastructure.6 The UxS Autonomy program was initiated by the Program Executive Office for Ground Combat Systems (PEO GCS) to bypass legacy defense procurement timelines and fast-track the integration of advanced commercial autonomy software into active Army formations.6
2.1 The Initial Infantry Squad Vehicle (ISV) Integration Mandate
In its original conception, the UxS program required the three selected vendors—Forterra, Overland AI, and Scout AI—to retrofit the existing Infantry Squad Vehicle (ISV).1 The ISV is a lightweight, high-speed tactical transport vehicle based on the commercial Chevrolet Colorado ZR2 chassis, heavily modified to provide tactical mobility for a nine-Soldier infantry squad. Crucially, the ISV is designed for rapid airborne deployment, featuring specific structural rigging points for airdrops.5 The Army’s initial mandate was to transform this crewed, mechanical platform into a drive-by-wire autonomous vehicle by overlaying commercial perception stacks, compute nodes, and actuation kits.18
Under the original $15.5 million OTA, the resulting ISV prototypes were scheduled to be delivered to the 3rd Brigade, 10th Mountain Division at Fort Polk, Louisiana. There, the vehicles were to undergo a stringent six-month operational testing period, culminating in a rigorous Combat Training Center rotation to assess their viability in simulated combat environments.2
2.2 The Strategic Pivot to Surrogate Robotic Platforms
As the engineering integration phases progressed through late 2025, both the Army and its industry partners recognized significant mechanical and programmatic hurdles associated with utilizing the ISV as the universal surrogate for uncrewed autonomy testing.3 Industry sources cited “underlying deficiencies” in the ISV’s architecture that made it suboptimal for autonomous conversion.3 For example, the structural modifications required for airborne rigging, combined with the power demands of multi-modal sensor suites and heavy edge-compute modules, introduced substantial engineering bottlenecks that threatened to distract from the program’s core objective: evaluating the autonomy software itself.3 Additionally, the sheer kinetic mass of a fully loaded, autonomous ISV operating in close proximity to dismounted infantry presented elevated safety risks during the rapid prototyping phase.3
Consequently, the Army authorized a major strategic pivot just weeks after the initial contract awards. Acknowledging the rapidly changing technology environment, PEO GCS altered the program rules to allow the UxS vendors to select and provide their own preferred surrogate mobility platforms, rather than forcing integration onto the ISV.3 This programmatic shift decoupled the evaluation of the autonomy software from the mechanical limitations of a specific chassis.20 The Army’s stated objective was to assess the autonomous command and control directly against mission parameters—such as logistics resupply, casualty evacuation, and target identification—rather than assessing the vendors’ ability to engineer custom drive-by-wire connections to the ISV’s proprietary middleware.3 However, shortly after this strategic pivot, the program was paused pending new acquisition guidance.3
2.3 The Planned Evaluation Framework and Program Pause
The originally scheduled May 2026 evaluations were intended to serve as the critical milestone for the UxS program.5 The focus had shifted toward demonstrating how the autonomous systems integrate into the broader Next Generation Command and Control (NGC2) architecture.3 However, industry reports in late 2025 and April 2026 confirmed that the UxS program has been placed in a holding pattern and is currently paused pending new acquisition guidance.33 If resumed, evaluations will likely test specific mission alignments, utilizing the vendor-supplied surrogate platforms to execute complex tactical behaviors. These behaviors include “Hunter-Killer” operations, electronic warfare surveillance, reconnaissance screening, and navigating the “last tactical mile”—the highly dangerous, unstructured terrain separating support units from the forward line of troops (FLOT) where human resupply convoys are most vulnerable.21
3. Competitor Analysis: Divergent Autonomy Architectures
The development generated under the UxS program serves as a comparative crucible for three highly distinct architectural approaches to off-road autonomy. Forterra, Overland AI, and Scout AI each bring a unique engineering philosophy regarding sensor reliance, computational modeling, hardware integration, and command-and-control (C2) orchestration.
3.1 Forterra: AutoDrive and Active Sensor Prominence
Forterra operates as a prime contractor specializing in hardware-agnostic autonomy stacks and secure communications for heavy military platforms.19 Forterra’s core product, AutoDrive, is a deterministic, modular perception and planning system designed to manage dynamic driving tasks across complex tactical environments.24 The company has demonstrated significant traction within the Department of Defense, having successfully integrated AutoDrive into Marine-owned Joint Light Tactical Vehicles (JLTVs) for the Remotely Operated Ground Unit for Expeditionary (ROGUE) Fires program, as well as BAE Systems’ Armored Multi-Purpose Vehicle (AMPV).4
Following the Army’s pivot away from the ISV, Forterra unveiled its MESA platform in April 2026.4 Developed in direct partnership with Polaris, the MESA integrates AutoDrive onto a modified Polaris Ranger XD 1500 chassis.4 Because the autonomy hardware is integrated on the OEM production line, it avoids the mechanical compromises typical of aftermarket retrofits.4 The MESA is specifically designed to execute logistics and casualty evacuation (CASEVAC) missions in the last tactical mile, featuring a flat deck and an L-track mounting system capable of accommodating up to 2,000 pounds of interchangeable payloads.4 With the UxS program paused, Forterra intends to bid the MESA as either a prime or a partner for future Army autonomous CASEVAC and logistics operations.4
A critical differentiator in Forterra’s architecture is its reliance on high-fidelity active sensing. In January 2026, Forterra officially selected Aeva to provide 4D LiDAR technology for the AutoDrive system.778 AutoDrive utilizes Aeva’s sensors to map the environment simultaneously in three spatial dimensions plus a fourth dimension of velocity.25 This is supported by Forterra’s TerraLink autonomous vehicle management platform and Vektor software-defined communications, which ensure resilient C2 interoperability across disconnected, intermittent, and low-bandwidth (DIL) tactical mesh networks.4
3.2 Overland AI: OverDrive and Self-Supervised Adaptive Learning
Overland AI, spun out of an autonomous robotics laboratory at the University of Washington and heavily involved in DARPA’s Robotic Autonomy in Complex Environments with Resiliency (RACER) program, approaches off-road navigation through advanced machine learning and stochastic modeling.27 The company’s architecture is divided into three core technologies: the OverDrive autonomy stack, the OverWatch C2 fleet orchestration platform, and the SPARK hardware upfit kit.28 Demonstrating the versatility of this stack, Overland AI successfully integrated OverDrive onto the U.S. Marine Corps’ ROGUE Fires prototype in April 2026, operating without human intervention over mixed terrain for several hours.78
Overland AI explicitly designs its systems to operate in unmapped, unpredictable terrain without continuous communication links or GPS.29 The perception system utilizes a combination of 3D LiDAR, stereo cameras, radar, IMUs, and speed encoders to generate a real-time digital twin of the environment.27 Rather than relying on rigid geometric rules, OverDrive runs dynamic simulations to test all possible trajectories, choosing the safest route based on continuously updated environmental data.27 To execute this on surrogate platforms, Overland AI utilizes the SPARK kit—an ultra-compact, modular compute node that attaches via drive-by-wire interfaces to rapidly convert existing vehicles into autonomous assets.31 Overland AI also offers its own fully autonomous tactical vehicle, the ULTRA, which is capable of carrying 1,000-pound payloads and conducting counter-UAS and reconnaissance missions.27
The defining characteristic of Overland AI’s software is its use of self-supervised adaptive learning.10 Instead of requiring massive datasets of hand-labeled semantic images (which fail when the vehicle encounters novel environments), OverDrive utilizes proprioceptive feedback from the vehicle’s chassis to dynamically learn the physical cost of traversing specific terrains in real-time, instantly adjusting its navigational behavior.10
3.3 Scout AI: Fury and Vision-Language-Action (VLA) Foundation Models
Scout AI presents a radically different paradigm for ground autonomy, rejecting the multi-modal, active-sensor architectures favored by Forterra and Overland AI. Instead, Scout AI deploys Fury, a fully learned, camera-only autonomy system driven by Vision-Language-Action (VLA) reasoning.11 Fury functions as a multi-domain foundation model that maps raw optical pixel inputs and verbal or textual mission commands directly to vehicle control actions, entirely bypassing traditional hand-engineered geometric autonomy stacks.33
The technical and tactical rationale behind Scout AI’s camera-only approach is grounded in signature management and cost reduction.11 Active sensors like LiDAR and radar emit significant radio frequency (RF) and optical signatures, making the host vehicle highly susceptible to detection and targeting by adversarial electronic warfare (EW) systems.11 By relying exclusively on passive optical sensing, Fury maintains a minimal electronic signature.33 Furthermore, eliminating LiDAR significantly reduces the unit cost and physical footprint of the hardware stack. Scout’s second-generation Fury hardware is reportedly 90% smaller and vastly more power-efficient than previous iterations.11
To demonstrate this capability for the UxS program, Scout AI partnered exclusively with Textron Systems for vehicle integration and with Edge Case Research for independent safety validation.33 Additionally, the company partnered with Hendrick Motorsports Technical Solutions to deploy Fury on the NOMAD, a next-generation lightweight unmanned ground vehicle.36 To further scale this foundation model, Scout AI recently secured a $100 million Series A funding round in April 2026.37 The NOMAD platform is designed to act as an attritable asset—cheap enough to be deployed in high numbers and lost in combat without significant financial degradation to the unit.36
| Architectural Feature | Forterra (AutoDrive) | Overland AI (OverDrive) | Scout AI (Fury) |
| Primary Sensing Modality | 4D FMCW LiDAR (Aeva) + Optical + Radar | Stereo Cameras + 3D LiDAR + Radar | Camera-Only (Passive Sensing) |
| Algorithmic Paradigm | Modular Perception & Deterministic Planning | Self-Supervised Adaptive Learning | Vision-Language-Action (VLA) Foundation Model |
| Signature Management | Active Emissions (High Fidelity) | Active & Passive Fusion | Low-Signature (Passive Only) |
| Edge Compute Footprint | Heavy (Multi-Sensor Processing) | Medium (SPARK Modular Node) | Ultra-Light (90% Hardware Reduction) |
| Surrogate Platform Strategies | Polaris MESA, BAE AMPV, USMC ROGUE Fires | ULTRA UGV, Polaris RZR, SPARK Upfits | Hendrick Motorsports NOMAD UGV |
4. Sensor Fusion in Unstructured, GPS-Denied Environments
Commercial autonomous vehicles operate within highly structured Operational Design Domains (ODDs) featuring painted lane markings, predictable traffic rules, and continuous access to Real-Time Kinematic (RTK) GPS for centimeter-level localization.16 In stark contrast, the tactical environments targeted by military ground autonomy are characterized by hostile electronic warfare, GPS spoofing, signal jamming, and terrain completely devoid of geometric regularity.40 Relying on a single sensing modality or satellite-based navigation in these conditions leads to catastrophic system failure.
4.1 Vulnerabilities of Traditional Exteroceptive Sensing
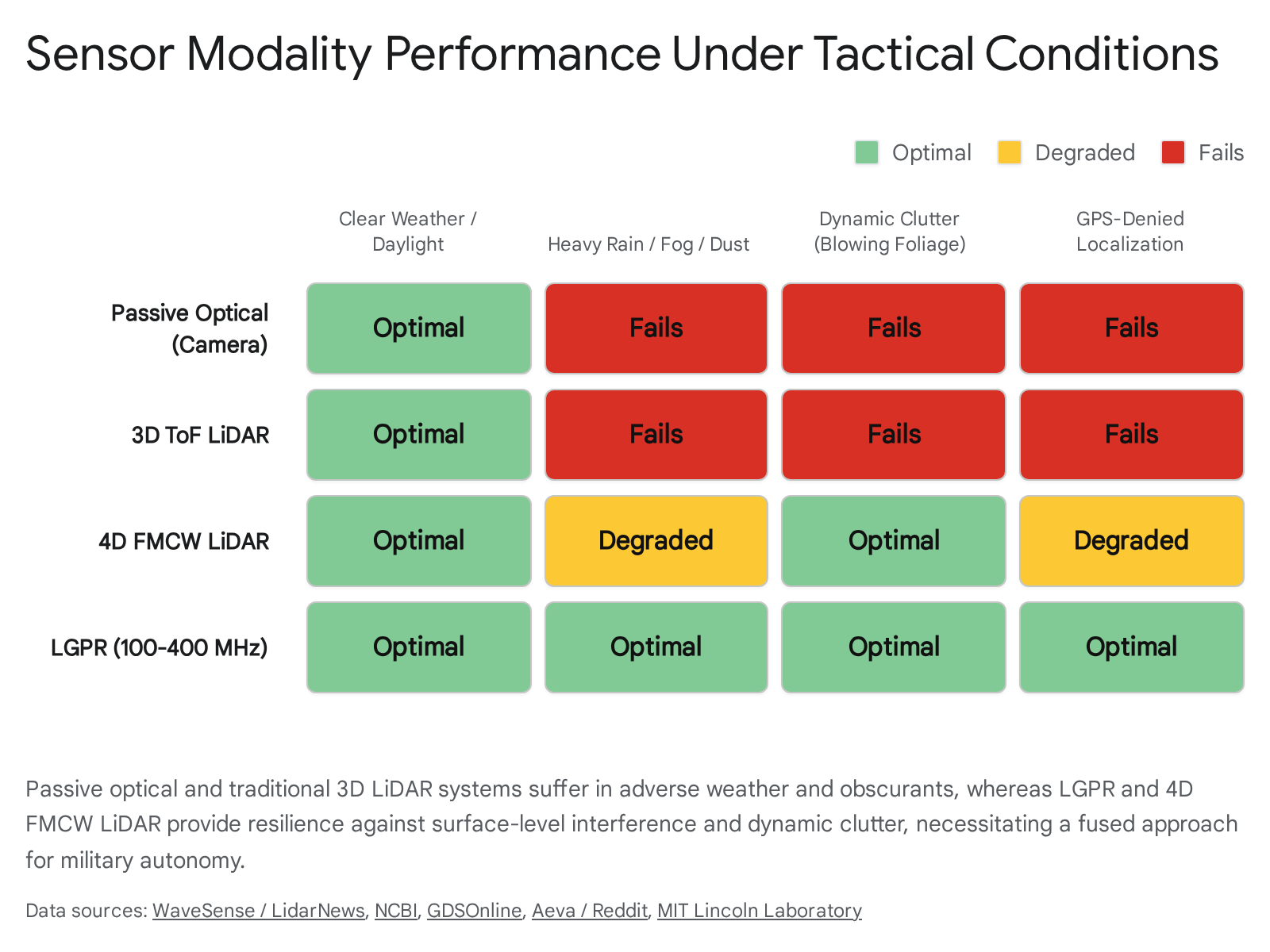
Standard exteroceptive sensors—specifically optical cameras and traditional 3D Time-of-Flight (ToF) LiDAR—possess critical operational vulnerabilities in tactical environments.40 Optical cameras suffer from inherent dynamic range limitations; they fail in total darkness, heavy precipitation, and the dense dust clouds (brownouts) frequently generated by military convoys navigating unpaved terrain.27
While traditional ToF LiDAR can provide high-resolution geometric maps in total darkness, its near-infrared laser pulses are heavily attenuated by rain, fog, and suspended dust particulate, causing the sensor to register false positives close to the vehicle.7 Furthermore, ToF LiDAR generates dense geometric point clouds but lacks inherent semantic understanding. A traditional LiDAR system cannot distinguish between a physically impenetrable concrete pillar and a highly compliant visual obstruction, such as a thick cloud of smoke or a patch of tall grass.10
4.2 Advanced Mechanics of 4D FMCW LiDAR
To overcome the limitations of ToF LiDAR, architectures like Forterra’s AutoDrive utilize 4D Frequency Modulated Continuous Wave (FMCW) LiDAR.8 Unlike ToF systems, which measure distance based on the round-trip time of discrete laser pulses, FMCW LiDAR continuously transmits a laser beam whose frequency is modulated over time.8
When the transmitted FMCW beam reflects off a moving object, it experiences a Doppler shift—a proportional change in frequency based on the object’s velocity relative to the sensor.8 By measuring this shift alongside the time delay, 4D LiDAR instantaneously captures both the precise 3D spatial position and the exact radial and axial velocity of the object.25 This allows the autonomy stack to immediately distinguish between static geometric obstacles (e.g., a rock formation) and dynamic clutter (e.g., blowing vegetation, falling rain, or shifting dust), which is vital for navigating heavy foliage without triggering false emergency stops.43 Additionally, FMCW sensors like the Aeva Atlas can detect low-reflectivity targets at ranges up to 500 meters and are completely immune to interference from direct sunlight or the blinding lasers of adversarial optical countermeasures.42
4.3 Localizing Ground-Penetrating Radar (LGPR)
To maintain absolute, centimeter-level localization in GPS-denied environments without relying on fragile above-ground optical features, autonomous military systems are increasingly integrating Localizing Ground Penetrating Radar (LGPR).9
Unlike high-frequency automotive radar (which operates around 77 GHz to detect surface-level objects), LGPR utilizes very high frequency (VHF) radio waves, typically in the 100 to 400 MHz range.7 An array of antennas mounted beneath the vehicle chassis uses an RF switch matrix to send these wide-beam radio waves downward, penetrating up to 10 feet into the earth.7 As the waves encounter subterranean anomalies—such as variations in soil strata, bedrock formations, buried utility lines, or dense root systems—they reflect back to the receiver.7
Because subterranean geology remains extremely stable over time and is entirely unaffected by surface weather, time of day, or atmospheric obscurants, LGPR creates a highly reliable electromagnetic “fingerprint” of the subsurface.45 During an initial mapping pass, these subterranean B-scan fingerprints are correlated with baseline geographic coordinates.7 During subsequent autonomous operations in a GPS-denied zone, the UGV scans the subsurface in real-time. The system utilizes deep convolutional neural networks, such as NetVLAD, to extract features from the incoming A-scans and matches them against the pre-recorded LGPR map.47 This technique enables continuous, highly accurate relative pose estimation and true orthogonal redundancy for navigation, independent of satellite constellations.48
4.4 Advanced Multi-Modal Fusion Algorithms
The prototypes evaluated under the UxS mandate must execute a continuous, fault-tolerant sensor fusion loop. A robust architecture processes the 4D FMCW LiDAR point clouds, the high-resolution semantic data from passive optical sensors, and the absolute localization data from the LGPR array.50
To integrate this diverse data mathematically, advanced non-linear regression techniques are employed, such as Gaussian Process Regression (GPR).52 A Gaussian Process is defined mathematically as a distribution over functions, allowing the autonomy system to define the covariance of the incoming data dynamically.52 If the optical camera is suddenly blinded by a laser dazzler or covered by mud splatter, the fusion algorithm detects the spike in error rates and dynamically adjusts the covariance weights. The system mathematically deprioritizes the optical stream and shifts the navigational reliance to the LiDAR and LGPR streams, sustaining the autonomy loop without critical interruption.52
5. Algorithmic Approaches to Obstacle Classification in Heavy Foliage and Mud
The transition from improved, structured roads to chaotic, unstructured off-road environments introduces profound algorithmic challenges. These challenges are primarily driven by the high intra-class variance of natural environments and the complex physical interactions between the vehicle’s tires and the terrain, known as terramechanics.10
5.1 Intra-Class Variance and the Problem of Compliant Obstacles
In structured civilian environments, obstacle detection is largely a binary calculation: an object is either a traversable surface (asphalt) or a non-traversable hazard (pedestrian, vehicle, concrete wall).10 Off-road environments destroy this simplistic binary logic. A purely geometric occupancy grid generated by a traditional LiDAR system will register a three-foot-tall rigid boulder and a three-foot-tall patch of compliant switchgrass as identical geometric anomalies.10 Lacking semantic context, a standard path planner will halt the vehicle in front of both, resulting in “frozen robot syndrome,” where the UGV refuses to navigate through entirely traversable foliage.10
Furthermore, off-road terrain types exhibit extreme intra-class variance. A visual sensor may successfully segment a section of a trail as “mud,” but human operators intuitively understand that dark, pooling mud in a deep depression is likely a mobility trap, while lighter, drier mud on a slight incline is safely traversable.10 Attempting to hand-code rigid heuristic cost values for every possible physical state of mud, sand, gravel, or grass is mathematically impossible.10
5.2 Self-Supervised Costmap Learning and Maximum Entropy IRL
To overcome the limitations of rigid geometry and heuristic coding, advanced military autonomy systems rely on complex machine learning paradigms, specifically Maximum Entropy Inverse Reinforcement Learning (MaxEnt IRL) and self-supervised costmap generation.10
Rather than relying on human labelers to annotate millions of images—which scales poorly and fails when the UGV enters a novel ecosystem—these systems learn a continuous traversability cost function directly from human expert demonstrations and proprioceptive feedback.10 During training, as a human operator drives the vehicle through a forested area, the algorithm captures exteroceptive data (how the terrain looks via cameras and LiDAR) and mathematically correlates it with proprioceptive data (how the terrain feels via IMU linear acceleration, suspension deflection, and wheel slip).10

The algorithms train an ensemble of Fully Convolutional Networks (FCNs) to predict these physical interaction costs from visual inputs.10 To manage the inherent statistical uncertainty of deep neural networks in off-road feature spaces, the system utilizes Conditional Value-at-Risk (CVaR) as its primary risk metric.10 By adjusting a defined risk-tolerance parameter mathematically represented as , military commanders can directly dictate the UGV’s navigational behavior.10 In a low-risk, peacetime logistical mission, the CVaR threshold is set conservatively, and the UGV will path around tall grass, treating it as an unknown threat. In a high-risk combat scenario ( adjusted closer to 1), the CVaR threshold shifts, and the algorithm will command the vehicle to aggressively push through the compliant foliage to maintain tactical speed and avoid open-ground exposure.10The algorithms train an ensemble of Fully Convolutional Networks (FCNs) to predict these physical interaction costs from visual inputs.10 To manage the inherent statistical uncertainty of deep neural networks in off-road feature spaces, the system utilizes Conditional Value-at-Risk (CVaR) as its primary risk metric.10 By adjusting a defined risk-tolerance parameter mathematically represented as , military commanders can directly dictate the UGV’s navigational behavior.10 In a low-risk, peacetime logistical mission, the CVaR threshold is set conservatively, and the UGV will path around tall grass, treating it as an unknown threat. In a high-risk combat scenario ( adjusted closer to 1), the CVaR threshold shifts, and the algorithm will command the vehicle to aggressively push through the compliant foliage to maintain tactical speed and avoid open-ground exposure.10The algorithms train an ensemble of Fully Convolutional Networks (FCNs) to predict these physical interaction costs from visual inputs.10 To manage the inherent statistical uncertainty of deep neural networks in off-road feature spaces, the system utilizes Conditional Value-at-Risk (CVaR) as its primary risk metric.10 By adjusting a defined risk-tolerance parameter mathematically represented as , military commanders can directly dictate the UGV’s navigational behavior.10 In a low-risk, peacetime logistical mission, the CVaR threshold is set conservatively, and the UGV will path around tall grass, treating it as an unknown threat. In a high-risk combat scenario ( adjusted closer to 1), the CVaR threshold shifts, and the algorithm will command the vehicle to aggressively push through the compliant foliage to maintain tactical speed and avoid open-ground exposure.10
5.3 Dynamic Adaptation: SALON and ALTER Algorithms
To ensure UGVs can rapidly adapt to entirely novel environments without prior human labeling, developers utilize real-time, online adaptive frameworks. The Self-supervised Adaptive Learning for Off-road Navigation (SALON) framework leverages Visual Foundation Models (VFMs), such as DINOv2, to extract generalizable visual features from the terrain.10 SALON grounds these visual features using the robot’s immediate proprioceptive experience.10 Within seconds of encountering a new terrain type, the system associates the incoming visual representation with the physical roughness experienced by the chassis, instantly generating accurate, risk-aware costmaps and speedmaps.10
Similar VFM-driven approaches, such as the Velociraptor system, leverage models like SAM and DINOv2 to project visual and geometric features into a Bird’s Eye View (BEV) space.10 This allows the system to produce risk-aware costmaps, speedmaps, and uncertainty maps from just forty minutes of expert driving data, entirely without manual human annotation.10


To provide long-range visibility, systems utilize the Adaptive Long-range Traversibility EstimatoR (ALTER).10 Because LiDAR is highly accurate at short ranges but degrades over distance, ALTER uses the near-range LiDAR data to continuously train the visual camera models online.10 The algorithm extracts specific geometric features from the accumulated LiDAR voxel map, such as object height () and surface planarity (), calculated via singular value decomposition (SVD).10 These near-range, 3D geometric labels are projected onto the 2D camera image plane, creating dense, pixel-wise training labels.10 This self-supervised loop allows the neural network to learn the visual appearance of distant forest trails and dry grassy hills in real-time, effectively predicting traversability at distances far beyond the effective range of the LiDAR sensor.10To provide long-range visibility, systems utilize the Adaptive Long-range Traversibility EstimatoR (ALTER).10 Because LiDAR is highly accurate at short ranges but degrades over distance, ALTER uses the near-range LiDAR data to continuously train the visual camera models online.10 The algorithm extracts specific geometric features from the accumulated LiDAR voxel map, such as object height () and surface planarity (), calculated via singular value decomposition (SVD).10 These near-range, 3D geometric labels are projected onto the 2D camera image plane, creating dense, pixel-wise training labels.10 This self-supervised loop allows the neural network to learn the visual appearance of distant forest trails and dry grassy hills in real-time, effectively predicting traversability at distances far beyond the effective range of the LiDAR sensor.10To provide long-range visibility, systems utilize the Adaptive Long-range Traversibility EstimatoR (ALTER).10 Because LiDAR is highly accurate at short ranges but degrades over distance, ALTER uses the near-range LiDAR data to continuously train the visual camera models online.10 The algorithm extracts specific geometric features from the accumulated LiDAR voxel map, such as object height () and surface planarity (), calculated via singular value decomposition (SVD).10 These near-range, 3D geometric labels are projected onto the 2D camera image plane, creating dense, pixel-wise training labels.10 This self-supervised loop allows the neural network to learn the visual appearance of distant forest trails and dry grassy hills in real-time, effectively predicting traversability at distances far beyond the effective range of the LiDAR sensor.10
5.4 Terramechanics, Sinkage, and Slip Prediction
Accurately classifying deformable terrains like mud and soft sand requires the integration of visual perception with classical terramechanics—the scientific study of soil-vehicle interaction.12 When navigating soft terrain, the UGV must avoid areas with low bearing capacity to prevent catastrophic wheel sinkage, slippage, and ultimate immobility.12
Classical terramechanics relies heavily on semi-empirical models, such as Bekker’s equations, which relate the applied wheel load to soil sinkage and shear stress.59 However, these equations traditionally require physical soil parameters that a UGV cannot measure until it is already driving on the surface.12 To predict vehicle mobility before physical contact, modern off-road autonomy stacks fuse 3D multi-modal semantic mapping with visual data.10
Algorithms analyze the terrain’s planarity and elevation using Markov Random Fields (MRF) applied to the LiDAR point clouds.10 Simultaneously, the system processes RGB and near-infrared optical data to assess soil moisture content and texture.62 The neural network utilizes this fused data to estimate the friction coefficient and deformability of the terrain ahead, proactively predicting potential wheel slip and sinkage rates.60 If the predicted slip parameter exceeds a safe operational threshold relative to the vehicle’s current velocity, mass, and center of gravity, the path planner dynamically generates an alternative route or modulates torque to avoid rollover or deep soil entrapment.61
| Terrain Type | Geometric Profile | Semantic & Terramechanic Properties | Algorithmic Classification Method |
| Asphalt / Concrete | High Planarity, Flat | High Friction, Low Deformability | Visual Segmentation + Low Slip Prediction |
| Tall Grass / Brush | High Elevation, Rough | Compliant, Moderate Friction | MaxEnt IRL, CVaR Risk Thresholding |
| Wet Mud / Clay | Low Elevation, Flat | Low Friction, High Sinkage/Deformability | Visual Texture Analysis + Bekker Sinkage Models |
| Dry Sand | Variable Elevation | Moderate Sinkage, High Slip Potential | LiDAR SVD Planarity + Proprioceptive Slip Updating |
| Rock Formations | High Elevation, Rigid | High Friction, Zero Deformability | LiDAR Occupancy Grids + Collision Avoidance |
6. Edge Compute (SWaP-C) Requirements for Tactical AI Inference
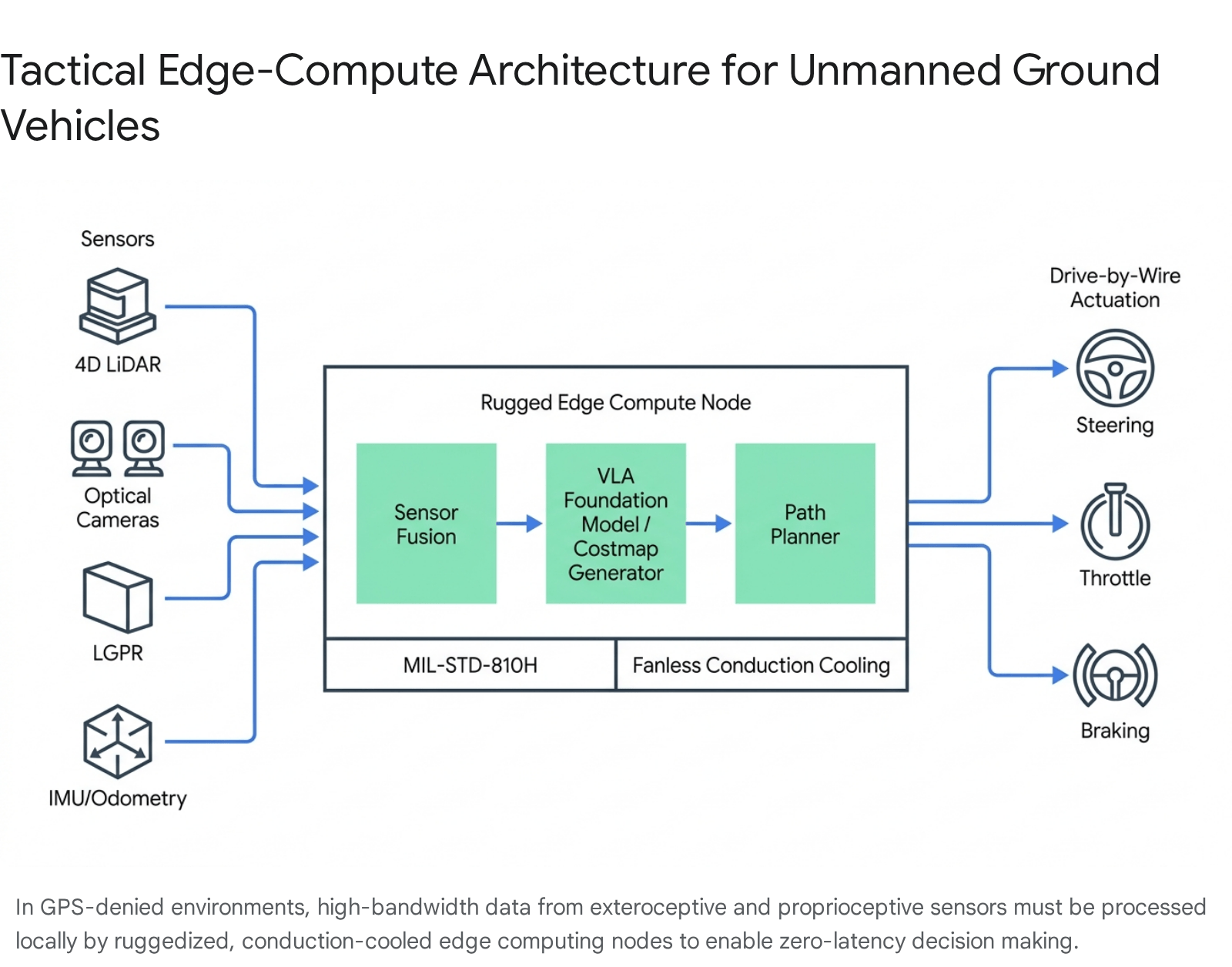
The immense computational load generated by processing 4D FMCW LiDAR point clouds, 100Hz LGPR scans, VLA foundation models, and real-time terramechanic slip predictions must occur locally on the vehicle. Relying on cloud-based processing or off-board data centers—standard practice for commercial AI and civilian autonomous vehicles—is impossible in military scenarios. Tactical environments are characterized by adversarial electronic warfare, persistent signal jamming, and the strict operational requirement for acoustic and electronic stealth.13 Consequently, the prototypes must feature highly ruggedized edge-compute architectures that adhere to stringent Size, Weight, Power, and Cooling (SWaP-C) constraints.
6.1 Hardware Architecture: GPUs, SoMs, and FPGAs
Defense engineers must meticulously balance the requirement for massive Tera Operations Per Second (TOPS) against fixed, often highly restrictive vehicle power budgets.14
In lightweight surrogate platforms or attritable logistical UGVs, where the total platform power budget allocated for compute is below 100 watts, System-on-Module (SoM) architectures are mandatory.14 Technologies such as the NVIDIA Jetson Orin AGX consolidate the Central Processing Unit (CPU), Graphics Processing Unit (GPU), and Deep Learning Accelerator (DLA) onto a single, highly efficient circuit board, providing sufficient inference capability at ultra-low wattages.13
For larger surrogate platforms—such as the Polaris MESA or heavily armored vehicles where power budgets can exceed 150 watts—discrete GPU cards based on advanced architectures (such as NVIDIA Ada Lovelace or Ampere) are utilized.14 These discrete GPUs, often housed in modular, ruggedized enclosures like the PacStar 431 or DuraCOR 9010, provide the massive parallel processing power required to ingest and fuse dense, multi-modal sensor streams simultaneously.14 Furthermore, Field Programmable Gate Arrays (FPGAs), such as the AMD/Xilinx Versal, are frequently integrated via PCIe or VPX standards to handle deterministic, ultra-low-latency signal processing (such as raw LGPR radar returns) before passing the sanitized, structured data to the GPU for semantic classification.14
6.2 Thermal Mitigation in MIL-STD-810H Environments
Continuous GPU acceleration and AI inference generate massive thermal output.67 Standard commercial computers rely on active cooling mechanisms (mechanical fans) to ingest ambient air and dissipate heat. In off-road combat environments characterized by severe dust, mud, sandstorms, and water ingress, mechanical fans act as immediate and catastrophic failure points, ingesting debris that destroys the internal circuitry.13
To achieve MIL-STD-810H certification and ensure survivability, edge compute nodes designed for the UxS program utilize patented fanless, conduction-cooled chassis architectures.13 In these systems, heat generated by the CPU, GPU, and memory modules is transferred via internal heat spreaders and copper heat pipes directly to the heavy, ridged aluminum exterior of the computer housing.13 The chassis itself acts as a massive heatsink, dissipating the thermal load passively into the surrounding environment.13 This thermal architecture prevents thermal throttling, ensuring zero-latency decision-making even when the vehicle is operating under peak processing loads in high-ambient-temperature desert environments.67 Additionally, eliminating cooling fans provides vital acoustic stealth, removing a prominent noise signature that could compromise the vehicle’s position during clandestine operations.13
7. Divergence of Military Off-Road Autonomy from Commercial Standards
The fundamental operational requirements and environmental realities of the U.S. Army render traditional commercial autonomous driving standards entirely obsolete. The prototypes evaluated for off-road military deployment must be measured against criteria that acknowledge the chaotic, hostile reality of warfare, departing significantly from civilian regulatory frameworks designed for paved highways.
7.1 The Inadequacy of SAE J3016 Automation Levels
The commercial automotive industry relies heavily on the SAE J3016 standard, which categorizes driving automation into six distinct levels, ranging from Level 0 (No Automation) to Level 5 (Full Automation).16 This taxonomy is fundamentally dependent on the concept of a defined Operational Design Domain (ODD)—the specific, bounded conditions under which the automated system is designed to operate (e.g., geofenced urban centers, mapped interstate highways, clear weather conditions, and speeds under 65 mph).16
Military off-road autonomy operates in an essentially unbounded and undefined ODD. There are no mapped lanes, weather constraints are routinely disregarded by mission necessity, and the physical environment may actively change during the operation (e.g., artillery strikes creating massive craters, or engineers intentionally breaching berms).6 Therefore, attempting to classify a military UGV using SAE levels is analytically flawed and practically useless. An autonomy stack might possess the technical sophistication of a commercial Level 4 system, yet operate in an environment so chaotic that it requires frequent remote human intervention or teleoperation simply to navigate a completely destroyed route.17 This intervention is not indicative of a system failure (as it would be under SAE guidelines), but rather a tactical necessity dictated by the extreme environment.17
7.2 ISO 26262, SOTIF (ISO 21448), and Military Risk Tolerance
Commercially, autonomous vehicle safety is governed by ISO 26262 (Functional Safety), which mandates a rigorous V-model development process to identify and prevent hazards caused by hardware or software malfunctions (e.g., an electrical short causing unintended steering actuation).15 As the complexity of machine learning in autonomous systems evolved, the industry adopted ISO 21448, known as the Safety of the Intended Functionality (SOTIF).71 SOTIF addresses hazards that occur without a system failure—situations where the sensors and algorithms work exactly as designed, but fail to interpret a complex edge case safely (e.g., a neural network misclassifying the broad side of a white tractor-trailer against a bright sky, leading to a collision).73
While ISO 26262 and SOTIF are designed to reduce operational risk to near zero to protect civilian occupants and pedestrians, military applications demand a fundamentally different risk calculus.17 A commercial vehicle’s primary, overriding goal is safety. A military surrogate UGV’s primary, overriding goal is mission execution.3
In tactical scenarios, a UGV may be required by the commander to intentionally execute a high-risk maneuver—such as aggressively traversing a suspected minefield to clear a path, or accelerating blindly through heavy smoke and hostile fire to deliver critical ammunition to a pinned-down squad.10 Therefore, military autonomy evaluation criteria do not merely ask, “Is the system safe?” They ask, “Can the human commander dynamically tune the system’s risk tolerance to match the strategic objectives?”.10 The software must be capable of overriding its inherent, commercially derived safety preservations if a higher-level command dictates attritable behavior to ensure the overall survival and success of the human force.75
| Framework Category | Commercial Application (SAE/ISO) | Military Application (UxS Program) |
| Operational Design Domain (ODD) | Bounded, mapped, structured, predictable. | Unbounded, unmapped, unstructured, hostile. |
| Primary Goal | Occupant/Pedestrian Safety, Zero Collisions. | Mission Execution, Force Multiplier, Attritability. |
| Risk Tolerance | Near-Zero. System fails to safe mode (stops). | Highly Variable. System must push through risk (CVaR tuning). |
| Sensor Vulnerability | Fails in extreme weather; relies on GPS. | Requires LGPR/4D LiDAR for EW/GPS-denied resilience. |
| Compute Location | Edge + Cloud Connectivity for updates/HD Maps. | 100% Edge Compute. Cloud reliance is fatal. |
8. Conclusion
The U.S. Army’s Unmanned Systems (UxS) Autonomy program represents a vital, paradigm-shifting transition from traditional hardware-centric procurement to software-defined lethality and logistics. By executing a strategic pivot away from the rigid structural confines of the Infantry Squad Vehicle (ISV) toward vendor-selected surrogate mobility platforms, the Army correctly prioritized the evaluation of the underlying neural networks, sensor fusion architectures, and command-and-control interfaces over chassis-specific mechanical integration.
The prototypes developed by Forterra, Overland AI, and Scout AI demonstrate divergent engineering approaches to solving the exact same extreme challenges. Whether utilizing Forterra’s heavily fused 4D FMCW LiDAR architectures, Overland AI’s proprioceptive self-supervised adaptive learning costmaps, or Scout AI’s passive Vision-Language-Action (VLA) foundation models, all systems must overcome the fundamental physical realities of the off-road battlefield. They must parse highly compliant foliage from rigid obstacles, predict soil terramechanics and sinkage rates in real-time, and execute these computationally massive tasks on ruggedized, conduction-cooled edge-compute nodes completely devoid of cloud connectivity or reliable GPS.
Ultimately, the successful deployment and scaling of these autonomous systems will necessitate a complete philosophical departure from civilian safety standards and regulatory frameworks. It will require the establishment of a new military framework of tactical risk-awareness—one that allows robotic platforms to maneuver, survive, absorb risk on behalf of human operators, and dominate in the most unpredictable and hostile environments on Earth.
9. Appendix: Methodology and Data Sources
This research report was compiled through a rigorous synthesis of technical documentation, defense procurement announcements, and academic robotics literature. The analysis prioritizes direct primary sources regarding the U.S. Army’s Unmanned Systems (UxS) Autonomy program, specifically leveraging official Department of Defense press releases, Other Transaction Authority (OTA) contract details, commercial vendor specifications, and specialized defense journalism.3
Technical data regarding advanced sensor modalities—specifically 4D FMCW LiDAR, Localizing Ground Penetrating Radar (LGPR), and passive optical sensors—was extracted from engineering whitepapers, patent descriptions, and academic journals focusing on field robotics and autonomous navigation.7 Information regarding algorithmic approaches to off-road traversability, including Maximum Entropy Inverse Reinforcement Learning (MaxEnt IRL), Self-supervised Adaptive Learning for Off-road Navigation (SALON), and Vision-Language-Action (VLA) foundation models, was sourced from recent publications originating from leading robotics institutions, including Carnegie Mellon University’s AirLab and the IEEE Robotics and Automation Society.10
Hardware specifications and SWaP-C constraints were evaluated using product documentation from ruggedized edge-compute manufacturers supplying the defense sector.13 Finally, the comparative analysis of commercial versus military standards utilized official frameworks defined by the Society of Automotive Engineers (SAE) and the International Organization for Standardization (ISO), contrasted against military operational doctrines.16
Please share the link on Facebook, Forums, with colleagues, etc. Your support is much appreciated and if you have any feedback, please email us in**@*********ps.com. If you’d like to request a report or order a reprint, please click here for the corresponding page to open in new tab.
Sources Used
- Army awards three OTA agreements for UxS Autonomy | Article, accessed July 1, 2026, https://www.army.mil/article/288155/army_awards_three_ota_agreements_for_uxs_autonomy
- US Army Awards Contract for Development of Autonomous Ground Vehicles – SOFX Report, accessed July 1, 2026, https://www.sofx.com/us-army-awards-contract-for-development-of-autonomous-ground-vehicles/
- Army shaking up new autonomy initiative, pivoting away from ISVs …, accessed July 1, 2026, https://breakingdefense.com/2025/09/army-shaking-up-new-autonomy-initiative-pivoting-away-from-isvs-sources/
- Forterra, Polaris tout new autonomous vehicle for CASEVAC, logistics – Breaking Defense, accessed July 1, 2026, https://breakingdefense.com/2026/04/forterra-polaris-tout-new-autonomous-vehicle-for-casevac-logistics/
- Army taps three companies to take ISVs unmanned – Breaking Defense, accessed July 1, 2026, https://breakingdefense.com/2025/08/army-taps-three-companies-to-take-isvs-unmanned/
- Army picks 3 startups to fast-track self-driving squad vehicle – Defense News, accessed July 1, 2026, https://www.defensenews.com/land/2025/09/02/army-picks-3-startups-to-fast-track-self-driving-squad-vehicle/
- WaveSense Uses GPR for Autonomous Vehicle Location – Lidar News, accessed July 1, 2026, https://lidarnews.com/wavesense-gpr-autonomous-vehicles/
- What is 4D LiDAR? – LTS Global Digital Services, accessed July 1, 2026, https://www.gdsonline.tech/what-is-4d-lidar/
- Localizing Ground-Penetrating Radar – Tech Notes, accessed July 1, 2026, https://archive.ll.mit.edu/publications/technotes/LGPR.html
- Autonomous Off-road driving | Learning-Based Navigation – AirLab, accessed July 1, 2026, https://theairlab.org/offroad/
- Scout AI, Hendrick Motorsports Unveil NOMAD UGV – Self Drive News, accessed July 1, 2026, https://selfdrivenews.com/scout-ai-hendrick-motorsports-unveil-nomad-ugv/
- The Prediction Method and Application of Off-Road Mobility for Ground Vehicles: A Review, accessed July 1, 2026, https://www.mdpi.com/2032-6653/16/1/47
- Rugged Military & Defense Computing Solutions | Fanless Edge AI | SINTRONES, accessed July 1, 2026, https://www.sintrones.com/solution/military-defense/
- Edge AI in Military Platforms | GOMA Technical Guides, accessed July 1, 2026, https://www.gomarugged.com/guides/edge-ai-military-platforms
- What ISO 26262 Expects from Your AV Safety Case | Edge Case, accessed July 1, 2026, https://www.ecr.ai/resource/what-iso-26262-expects-from-your-av-safety-case
- SAE Levels of Driving Automation™ Refined for Clarity and International Audience, accessed July 1, 2026, https://www.sae.org/news/blog/sae-levels-driving-automation-clarity-refinements
- Regulatory Policy for Autonomous Vehicle Safety & Deployment – Electrical and Computer Engineering, accessed July 1, 2026, https://users.ece.cmu.edu/~koopman/lectures/L132_2022-RegulatoryPolicy.pdf
- Army Selects 3 Firms to Develop Infantry Support Vehicles Under OTA Contracts, accessed July 1, 2026, https://www.executivegov.com/articles/army-ota-infantry-support-vehicles-contracts-autonomy
- Forterra Business Breakdown & Founding Story – Contrary Research, accessed July 1, 2026, https://research.contrary.com/company/forterra
- Defense News Digest: September 2025 Update – IDGA, accessed July 1, 2026, https://www.idga.org/command-and-control/articles/defense-news-digest-september-2025
- CPE Mission Autonomy Overview, accessed July 1, 2026, https://home.army.mil/rucker/6117/7332/4430/12_CPE_Mission_Autonomy_Overview_24_Feb_2026_FDO_Approved.pdf
- The Army wants an unmanned ground vehicle to evacuate wounded and resupply the front line – Task & Purpose, accessed July 1, 2026, https://taskandpurpose.com/news/army-ground-drone-casevac/
- Budget Activity 5A – Justification Book, accessed July 1, 2026, https://www.asafm.army.mil/Portals/72/Documents/BudgetMaterial/2027/Discretionary%20Budget/rdte/RDTE%20-%20Vol%203%20-%20Budget%20Activity%205A.pdf
- AutoDrive – Forterra, accessed July 1, 2026, https://www.forterra.com/autodrive
- Aeva Selected by Forterra to Power Next-Generation Autonomous Defense Vehicles with 4D LiDAR – Stock Titan, accessed July 1, 2026, https://www.stocktitan.net/news/AEVA/aeva-selected-by-forterra-to-power-next-generation-autonomous-1rm028d76kjb.html
- Forterra | Drive the Mission, accessed July 1, 2026, https://www.forterra.com/
- Overland AI Business Breakdown & Founding Story – Contrary Research, accessed July 1, 2026, https://research.contrary.com/company/overland-ai
- Overland AI, accessed July 1, 2026, https://www.overland.ai/
- OverDrive – Overland AI, accessed July 1, 2026, https://www.overland.ai/overdrive
- Tectonic Exclusive: Overland AI Wants to Take Your Vehicles and Make Them Autonomous, accessed July 1, 2026, https://www.overland.ai/news/tectonic-exclusive-overland-ai-wants-to-take-your-vehicles-and-make-them-autonomous
- Overland AI Launches SPARK to Deliver Instant Vehicle Autonomy to Military Fleets, accessed July 1, 2026, https://www.overland.ai/news/overland-ai-launches-spark-to-deliver-instant-vehicle-autonomy-to-military-fleets
- Semantic Scene Completion Based 3D Traversability Estimation for Off-Road Terrains, accessed July 1, 2026, https://arxiv.org/html/2412.08195v1
- Scout AI Awarded Army UxS Autonomy Contract – PR Newswire, accessed July 1, 2026, https://www.prnewswire.com/news-releases/scout-ai-awarded-army-uxs-autonomy-contract-302542164.html
- Scout AI secures major U.S. Army contract for autonomous vehicle tech By Investing.com, accessed July 1, 2026, https://www.investing.com/news/company-news/scout-ai-secures-major-us-army-contract-for-autonomous-vehicle-tech-93CH-4216980
- Watch: Fury platform brings agentic AI to battlefield drones – New Atlas, accessed July 1, 2026, https://newatlas.com/military/video-fury-ai-platform-battlefield-drones/
- Scout AI Partners with Hendrick Motorsports Technical Solutions on NOMAD – Defense UGV Automated by Fury – PR Newswire, accessed July 1, 2026, https://www.prnewswire.com/news-releases/scout-ai-partners-with-hendrick-motorsports-technical-solutions-on-nomad–defense-ugv-automated-by-fury-302543619.html
- Scout AI funding, news & analysis | Sacra, accessed July 1, 2026, https://sacra.com/c/scout-ai/
- Scout AI Expands With AI Military Contracts Surge – AI CERTs News, accessed July 1, 2026, https://www.aicerts.ai/news/scout-ai-expands-with-ai-military-contracts-surge/
- The Localizing Ground Penetrating Radar Evaluation Dataset – Robotics, accessed July 1, 2026, https://www.roboticsproceedings.org/rss17/p080.pdf
- A Systematic Review of Cutting-Edge Radar Technologies: Applications for Unmanned Ground Vehicles (UGVs) – PMC, accessed July 1, 2026, https://pmc.ncbi.nlm.nih.gov/articles/PMC11644924/
- Field Report on Ground Penetrating Radar for Localization at the Mars Desert Research Station – arXiv, accessed July 1, 2026, https://arxiv.org/html/2504.15455v2
- (PDF) Sensor system for development of perception systems for ATO – ResearchGate, accessed July 1, 2026, https://www.researchgate.net/publication/371425949_Sensor_system_for_development_of_perception_systems_for_ATO
- Aeva Introduces Atlas – The First Automotive-Grade 4D LiDAR Sensor for Mass Production Automotive Applications : r/MVIS – Reddit, accessed July 1, 2026, https://www.reddit.com/r/MVIS/comments/191lkki/aeva_introduces_atlas_the_first_automotivegrade/
- US12399279B1 – Enhanced hybrid LIDAR with high-speed scanning – Google Patents, accessed July 1, 2026, https://patents.google.com/patent/US12399279B1/en
- Ground Penetrating Radar: The Unlikely New Hero of Autonomous Vehicles – GSSI Geophysical Survey Systems, Inc., accessed July 1, 2026, https://www.geophysical.com/ground-penetrating-radar-the-unlikely-new-hero-of-autonomous-vehicles
- Automation of Armored Four-Wheel-Counter- Steer Vehicles – MIT Lincoln Laboratory, accessed July 1, 2026, https://www.ll.mit.edu/media/6866
- Underground Mapping and Localization Based on Ground-Penetrating Radar – CVF Open Access, accessed July 1, 2026, https://openaccess.thecvf.com/content/ACCV2024/papers/Zhang_Underground_Mapping_and_Localization_Based_on_Ground-Penetrating_Radar_ACCV_2024_paper.pdf
- GPR, Inc.: Ground Positioning Radar for Automated Driving, accessed July 1, 2026, https://gpr.com/
- MarsLGPR: Mars Rover Localization with Ground Penetrating Radar – arXiv, accessed July 1, 2026, https://arxiv.org/html/2503.04944v2
- Integration of Drones in Landscape Research: Technological Approaches and Applications, accessed July 1, 2026, https://www.mdpi.com/2504-446X/9/9/603
- Understanding Localization and Positioning – GPR, Inc., accessed July 1, 2026, https://gpr.com/blog/why-autonomy-relies-on-location-accuracy-understanding-localization-and-positioning/
- Robust Fusion of LiDAR and Wide-Angle Camera Data for Autonomous Mobile Robots, accessed July 1, 2026, https://www.mdpi.com/1424-8220/18/8/2730
- Autonomous Driving in Unstructured Environments: How Far Have We Come? – arXiv, accessed July 1, 2026, https://arxiv.org/html/2410.07701v3
- Classification of Off-road Terrains – University of Pretoria, accessed July 1, 2026, https://repository.up.ac.za/server/api/core/bitstreams/f637e3c9-abad-4b7d-ab25-f2b46fec2425/content
- Enhancing Indoors Robotic Traversability Estimation with Sensor Fusion – MavMatrix, accessed July 1, 2026, https://mavmatrix.uta.edu/cgi/viewcontent.cgi?article=1389&context=cse_dissertations
- Terrain classification for terrain parameter estimation based on a dynamic testing system, accessed July 1, 2026, https://www.emerald.com/sr/article-split/35/4/329/347236/Terrain-classification-for-terrain-parameter
- Geometric and visual terrain classification for autonomous mobile navigation | Request PDF, accessed July 1, 2026, https://www.researchgate.net/publication/321811282_Geometric_and_visual_terrain_classification_for_autonomous_mobile_navigation
- Abstracts | 55th Conference of the International Society for Terrain-Vehicle Systems – ISTVS 2025, accessed July 1, 2026, https://2025.istvs.org/submissions/abstracts
- Hybrid Terrain-Aware Path Planning: Integrating VD–RRT … – arXiv, accessed July 1, 2026, https://arxiv.org/html/2510.12169v1
- Visual Prediction of Rover Slip: Learning Algorithms and Field Experiments – DTIC, accessed July 1, 2026, https://apps.dtic.mil/sti/pdfs/ADA593494.pdf
- Verti-Bench: A General and Scalable Off-Road Mobility Benchmark for Vertically Challenging Terrain – Robotics, accessed July 1, 2026, https://www.roboticsproceedings.org/rss21/p138.pdf
- Obstacle Detection and Safely Navigate the Autonomous Vehicle from Unexpected Obstacles on the Driving Lane – PMC, accessed July 1, 2026, https://pmc.ncbi.nlm.nih.gov/articles/PMC7506726/
- 1 Abstract – arXiv, accessed July 1, 2026, https://arxiv.org/html/2510.21006v1
- AI at the Edge: Comparing NVIDIA Blackwell, Ada Lovelace and Ampere for Rugged GPU Defence Systems – Metromatics, accessed July 1, 2026, https://metromatics.com.au/ai-at-the-edge-rugged-gpu/
- When Seconds Matter Duracor 9010 Rugged Mission Computer Edge Computing | Defense Solutions | Curtiss-Wright, accessed July 1, 2026, https://defense-solutions.curtisswright.com/media-center/blog/when-seconds-matter-duracor-9010-rugged-mission-computer-edge-computing
- The Hard Problems No One Talks About in Edge AI – Curtiss-Wright Defense Solutions, accessed July 1, 2026, https://defense-solutions.curtisswright.com/media-center/blog/hard-problems-no-one-talks-about-edge-ai
- Tactical Autonomy: Edge AI for Unmanned Defense Robotics – sintrones, accessed July 1, 2026, https://www.sintrones.com/application/unmanned-defense-robotics-edge-ai/
- Let’s Finally Get Rid of the SAE Levels for Autonomous Driving, accessed July 1, 2026, https://thelastdriverlicenseholder.com/2026/02/04/lets-finally-get-rid-of-the-sae-levels-for-autonomous-driving/
- SAE J3016_202104.pdf – UNECE Wiki, accessed July 1, 2026, https://wiki.unece.org/download/attachments/128418539/SAE%20J3016_202104.pdf
- Test & Evaluation for Autonomous Military Vehicles: Challenges (Part 1) – Applied Intuition, accessed July 1, 2026, https://www.appliedintuition.com/blog/test-evaluation-for-autonomous-military-vehicles-challenges-part-1
- ISO 26262 vs. SOTIF (ISO/PAS 21448): What’s the Difference? | PTC, accessed July 1, 2026, https://www.ptc.com/en/blogs/alm/iso-26262-vs-sotif-iso-pas-21448-whats-the-difference
- Auto Mobility: The Future of Autonomous Vehicles and ISO 26262 – Nemko, accessed July 1, 2026, https://www.nemko.com/blog/auto-mobility-the-future-of-autonomous-vehicles-and-iso-26262
- Rethinking Autonomous Vehicle Functional Safety Standards: An Analysis of SOTIF and ISO 26262 – Automotive IQ, accessed July 1, 2026, https://www.automotive-iq.com/autonomous-drive/articles/rethinking-autonomous-vehicle-functional-safety-standards-an-analysis-of-sotif-and-iso-26262
- Overland AI: The Autonomous War Machine That Actually Works — For Now – Medium, accessed July 1, 2026, https://medium.com/@azha.khan.6/overland-ai-the-autonomous-war-machine-that-actually-works-for-now-69dc77bb0a8f
- Overland AI Is the First Ground Autonomy Company to Prime a Production Contract for the U.S. Military, accessed July 1, 2026, https://www.overland.ai/news/overland-ai-is-the-first-ground-autonomy-company-to-prime-a-production-contract-for-the-u-s-military
- Saab innovation Emerging technologies, accessed July 1, 2026, https://www.saab.com/about/innovation/emerging-technologies
- Aeva Selected by Forterra to Power Next-Generation Autonomous Defense Vehicles with 4D LiDAR, accessed July 1, 2026, https://www.forterra.com/posts/aeva-selected-by-forterra-to-power-next-generation-autonomous-defense-vehicles-with-4d-lidar
- Overland AI Demonstrates Autonomous Ground Capability for USMC ROGUE Fires, accessed July 1, 2026, https://www.overland.ai/news/overland-ai-demonstrates-autonomous-ground-capability-for-usmc-rogue-fires